

A highly sensitive five-degree-of-freedom array tactile sensor
A tactile sensor, degree of freedom technology, applied in the field of sensors, can solve the problem of low tangential detection sensitivity, and achieve the effects of high spatial force detection, high spatial resolution, and improved sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
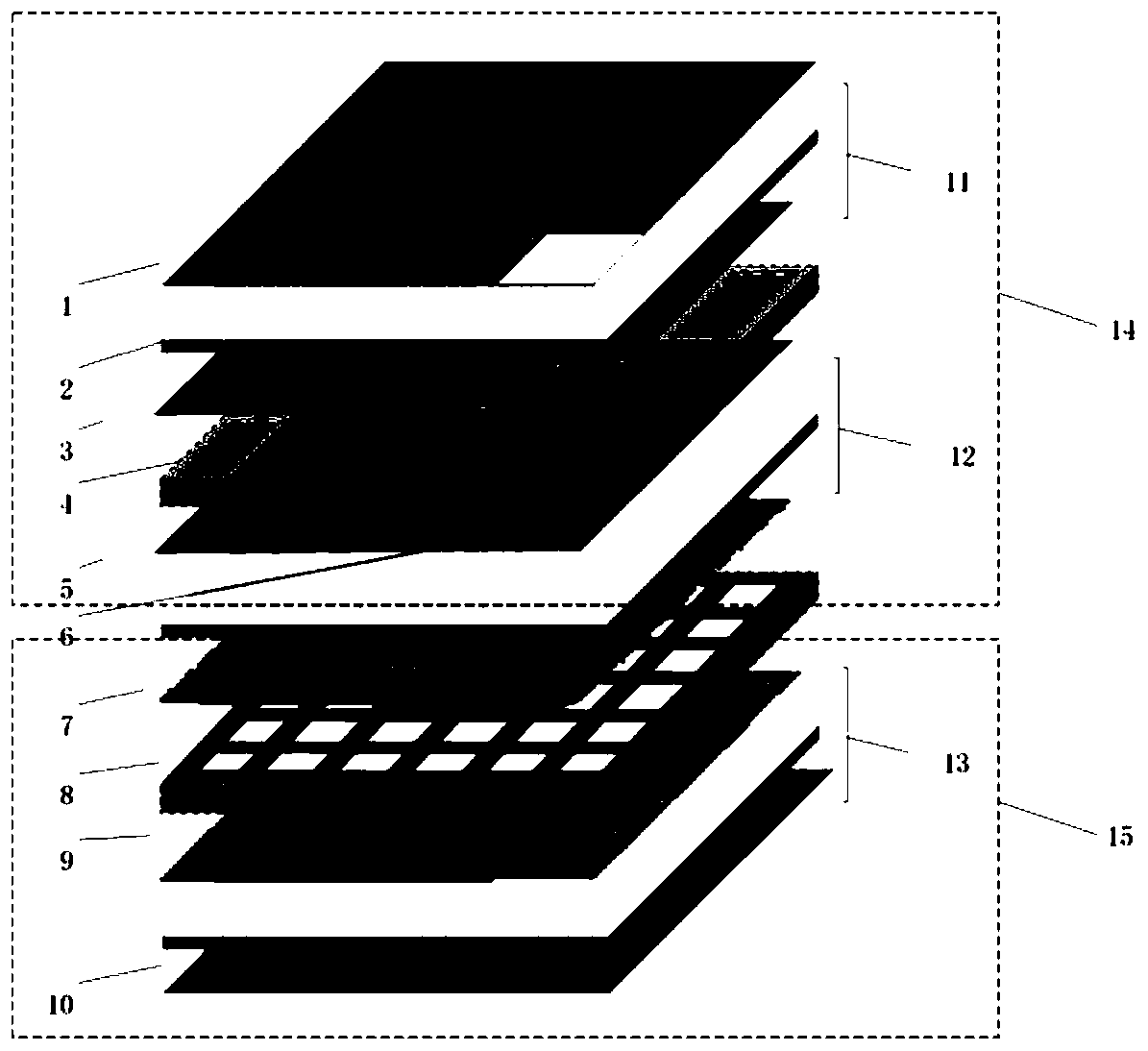
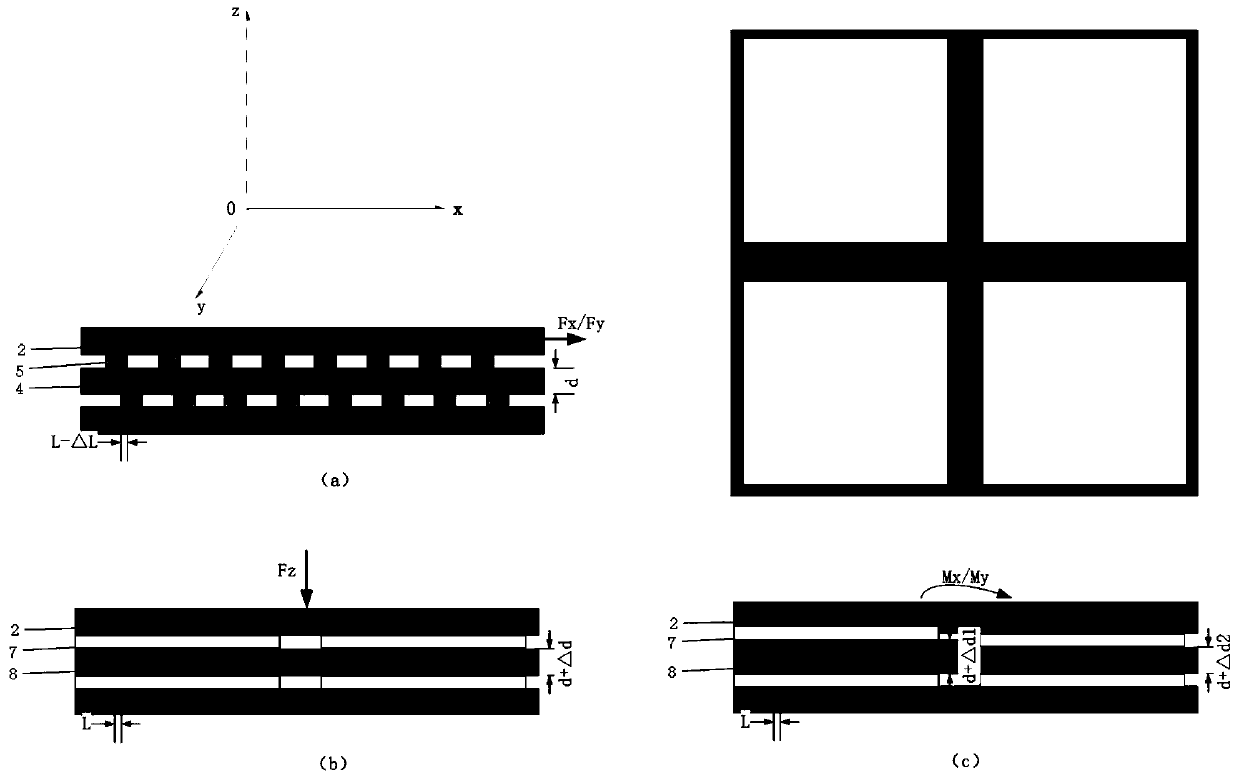
[0033] Such as figure 1 As shown, this implementation example is based on a high-sensitivity five-degree-of-freedom array tactile sensor, which mainly consists of an upper printed circuit board 11, a shear dielectric layer 4, an intermediate printed circuit board 12, a forward dielectric layer 8, and a lower printed circuit board 13. Composed layer by layer. The sensor is based on the capacitive working mechanism. The middle printed circuit board is used as a fixed electrode, and the upper and lower printed circuit boards are respectively used as positive pressure / tangential force movable plates. Due to the external force, the sensor will cause changes in the capacitance structure parameters of the sensor. By measuring the capacitance change, the positive pressure Fz, tangential force Fx / Fy and moment Mx / My acting on the sensor can be sensed. The working principle is shown in the figure figure 2 shown.
[0034] The tactile sensor is under the action of tangential force Fx / F...
example 2
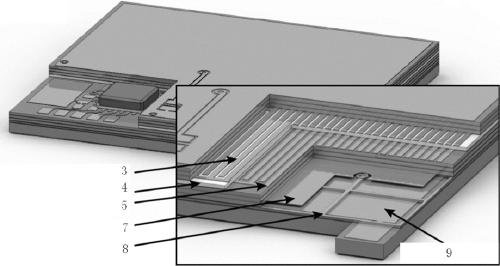
[0040] Such as Figure 4 As shown, the tactile sensor in the left figure shows the lower panel structure of the middle layer printed circuit board of the sensor, and this patent is set to N×N total N 2 A rectangular exposed electrode plate, output N 2 The digital-to-analog conversion is realized through the digital conversion chipset, and the serial port transmission method is used to transmit the data to the single-chip microcomputer for data packaging processing. The array sensor transmission signal is packaged into a data set formed by multiple frames of tactile pressure image data, and then transmitted to the PC. Realize the signal display, and finally realize the array pressure detection of the tactile sensor.
[0041] Among them, the lower panel structure of the middle layer printed circuit board of the tactile sensor is to realize N 2 block the signal output of the exposed electrodes, taking into account the N 2 Due to the difficulty of signal routing, it is planned ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More