

Multi-unmanned aerial vehicle cooperative malodor source tracing method based on particle swarm optimization
A particle swarm algorithm and multi-UAV technology, applied in the field of multi-UAV cooperative odor traceability, can solve the problems of slow positioning method, small coverage area of grid automatic detection method, and low positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
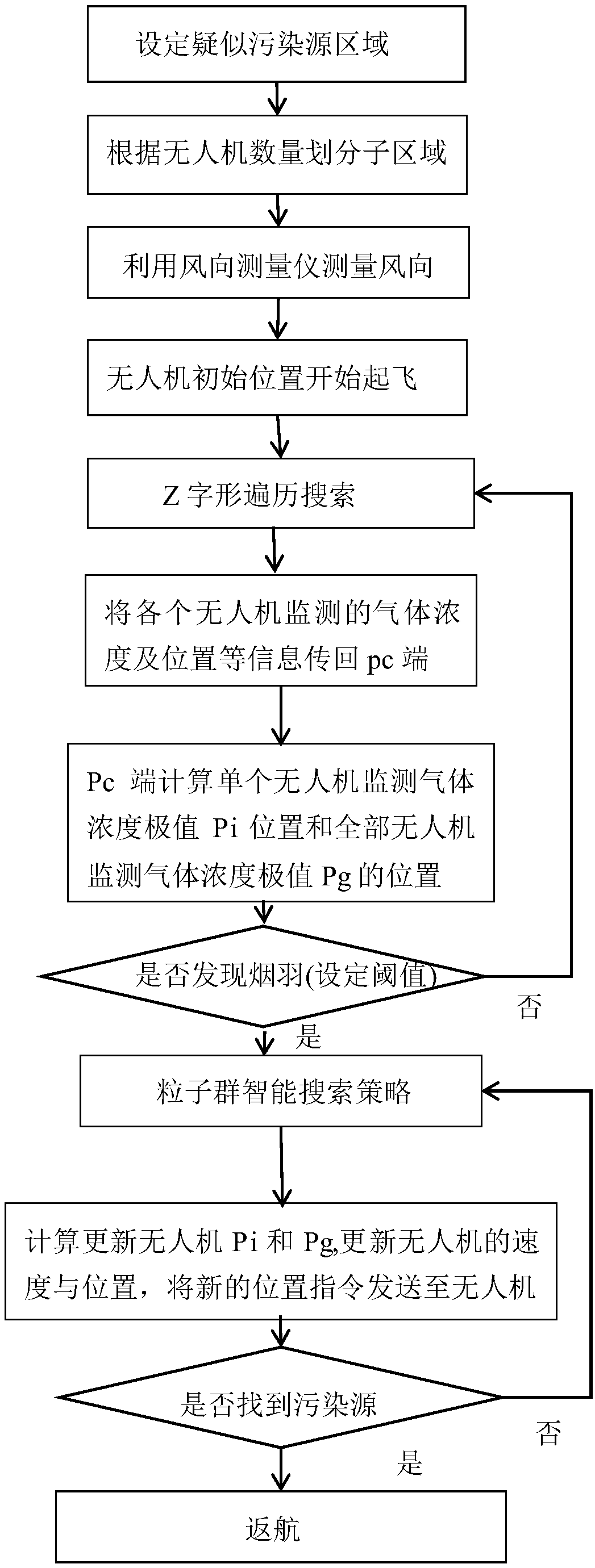
[0018] like figure 1 As shown, a multi-UAV cooperative odor traceability method based on the particle swarm optimization algorithm specifically includes the following steps:
[0019] Step 1: Use the artificial olfactory method to set the areas of suspected odor pollution sources. The areas of suspected odor pollution sources are usually set in densely distributed areas such as petrochemical plants, waste treatment plants, sewage treatment plants, feed mills, fertilizer processing plants, and leather factories. .
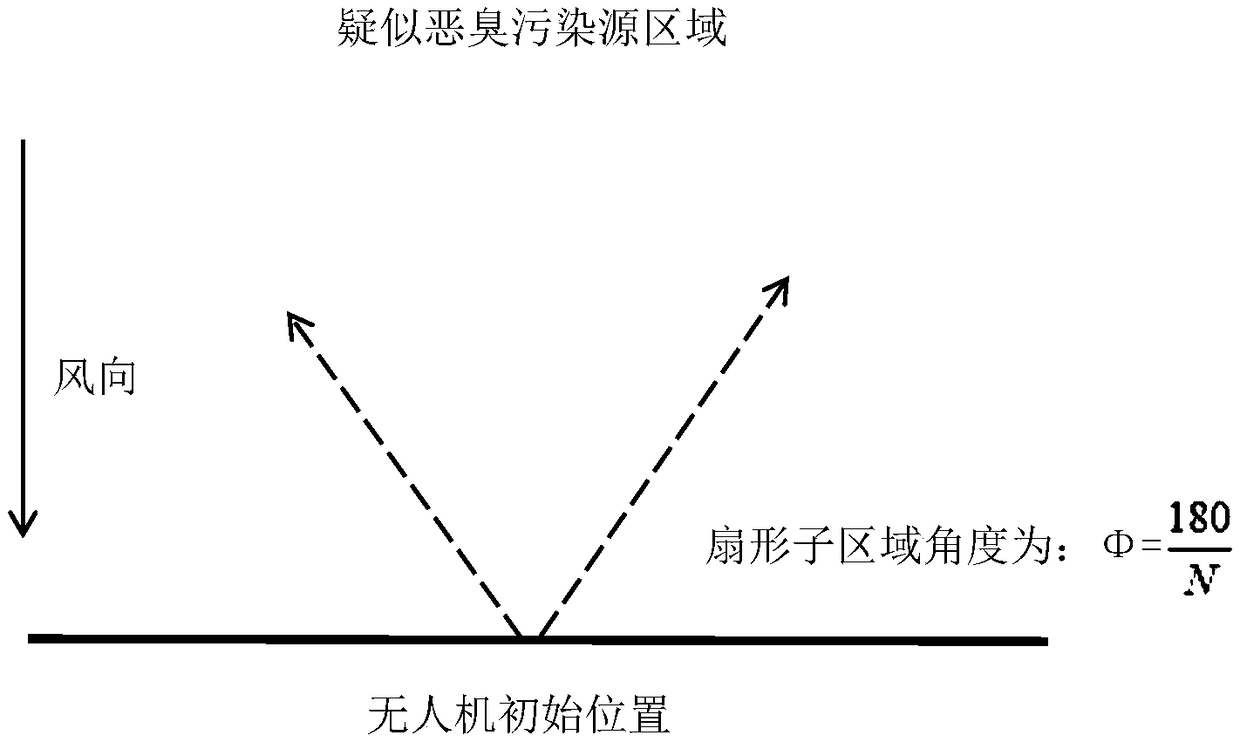
[0020] Step 2: Use the wind direction measuring instrument to measure the wind direction of the suspected odor pollution source area, so that each drone can search against the wind, improve the efficiency of pollution source location, reduce the number of particles and reduce costs.
[0021] Step 3: According to the number N of UAVs, the suspected pollution sources are regionalized into multiple sub-regions. A drone is placed in each sub-area to form a particle for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More