

Coupling identification and decoupling control design method of two-degree-of-freedom servo cradle head system
A technology of decoupling control and design method, which is applied in the field of coupling identification and decoupling control design, and can solve problems such as huge amount of calculation, inability to design frequency domain characteristics, and occupying large computing resources.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
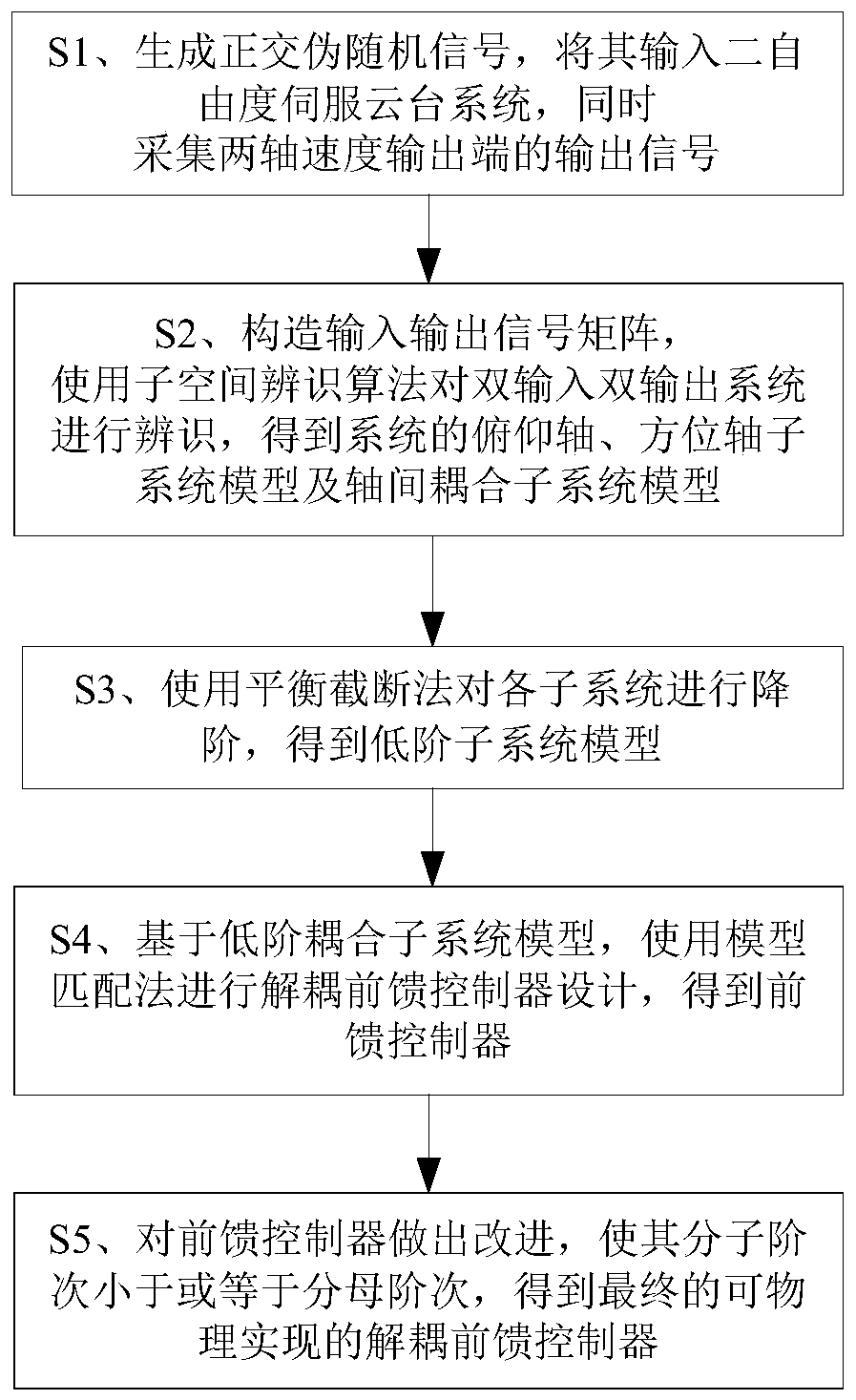
[0076] This embodiment discloses a coupling identification and decoupling control design method for a two-degree-of-freedom servo pan / tilt system, as shown in figure 1 As shown, the steps are as follows:
[0077] S1. Generate an orthogonal pseudo-random signal, input it into the two-degree-of-freedom servo pan-tilt system, and simultaneously collect output signals from two-axis speed output terminals.
[0078] Currently, the input signals used for system identification are usually white noise signals and pseudo-random signals. Relatively speaking, the random characteristics of white noise signals easily lead to statistical errors, while the low-frequency autocorrelation function of pseudo-random signals is similar to white noise and is easy to generate. Therefore, in this embodiment, a pseudo-random signal is used as an input signal for system identification. Considering that the two-degree-of-freedom servo pan-tilt system is a dual-input and dual-output system, it is difficu...
Embodiment 2
[0132] This embodiment discloses a storage medium, which stores a program. When the program is executed by a processor, the coupling identification and decoupling control design method of the two-degree-of-freedom servo pan / tilt system described in Embodiment 1 is implemented, specifically as follows:
[0133] S1. Generate an orthogonal pseudo-random signal, input it into the two-degree-of-freedom servo pan-tilt system, and collect the output signals of the two-axis speed output terminals at the same time;
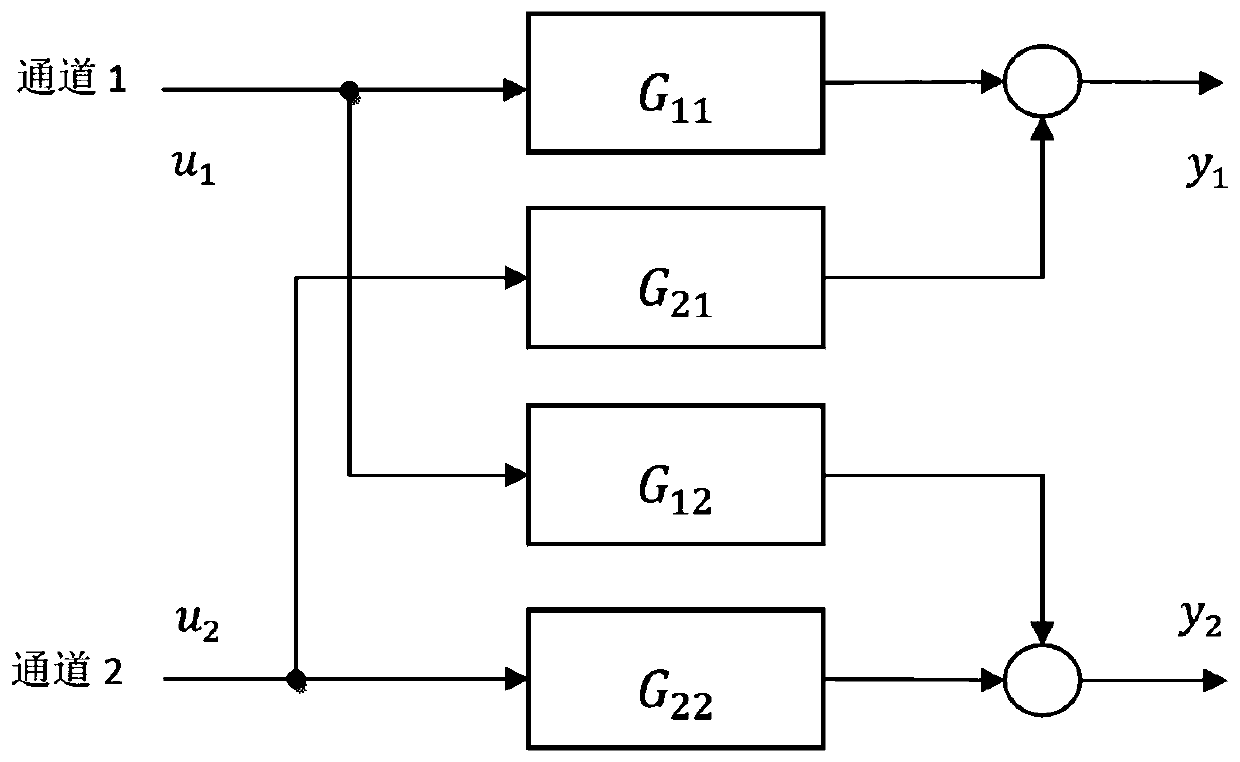
[0134] S2. Construct the input-output signal matrix, use the subspace identification algorithm to identify the double-input and double-output system, and obtain the system's pitch axis, azimuth axis subsystem model and inter-axis coupling subsystem model;
[0135] S3. Using the balanced truncation method to reduce the order of each subsystem to obtain a low-order subsystem model;
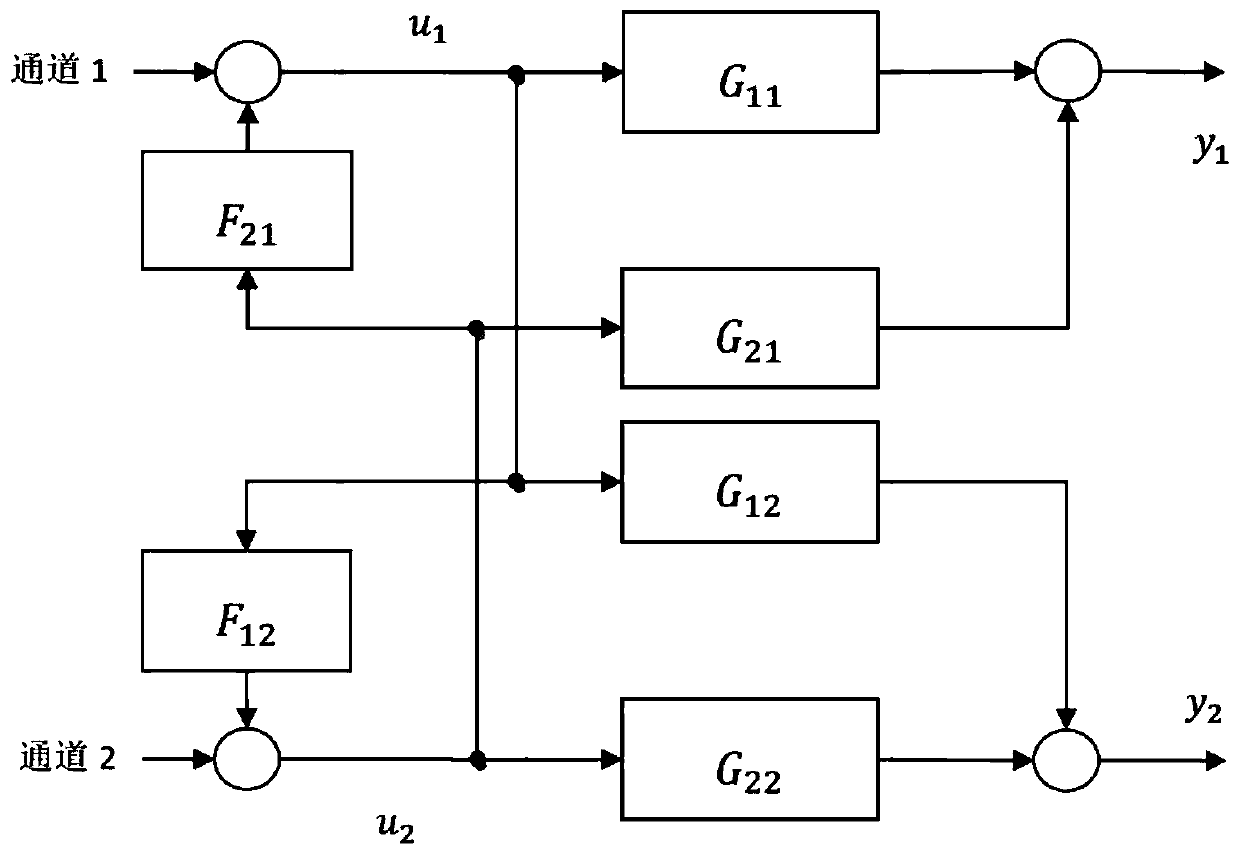
[0136] S4. Based on the low-order coupled subsystem model, use the model matching method to ...
Embodiment 3
[0140] This embodiment discloses a computing device, including a processor and a memory for storing executable programs of the processor. When the processor executes the program stored in the memory, the two-degree-of-freedom servo pan-tilt system described in Embodiment 1 is realized. The coupling identification and decoupling control design methods of the system are as follows:
[0141] S1. Generate an orthogonal pseudo-random signal, input it into the two-degree-of-freedom servo pan-tilt system, and collect the output signals of the two-axis speed output terminals at the same time;
[0142] S2. Construct the input-output signal matrix, use the subspace identification algorithm to identify the double-input and double-output system, and obtain the system's pitch axis, azimuth axis subsystem model and inter-axis coupling subsystem model;
[0143] S3. Using the balanced truncation method to reduce the order of each subsystem to obtain a low-order subsystem model;
[0144] S4. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More