

Method for accurately controlling starting process of direct-current torque motor
A technology of DC torque motor and starting process, which is applied to the starter of a single DC motor, DC motor speed/torque control, motor generator/starter, etc. and other problems, to achieve the effect of improving system reliability, accurate calculation data, and simple implementation method.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0038] Embodiment 1, infrared imaging seeker optical cabin, course motor parameters:
[0039] Armature resistance: (21±2.7)Ω (at 20°C)
[0040] Maximum no-load speed
[0041] When the voltage is 22.5V, the no-load speed in the positive and negative directions is (410±41)r / min.
[0042] Continuous stall torque and continuous stall voltage
[0043] When the motor is supplied with a continuous locked-rotor current of 1.06A,
[0044] Continuous stall torque ≥ 0.48N.m
[0045] The continuous locked rotor voltage is (22.5V±2.3)V
[0046] Stall torque sensitivity: ≥0.45N.m / A
[0047] Starting voltage
[0048] No-load starting voltage ≤ 1.5V, forward and reverse starting voltage difference ≤ 0.2V
[0049] Torque fluctuation coefficient: ≤10%
[0050] Electrical time constant: ≤1ms (reference value)
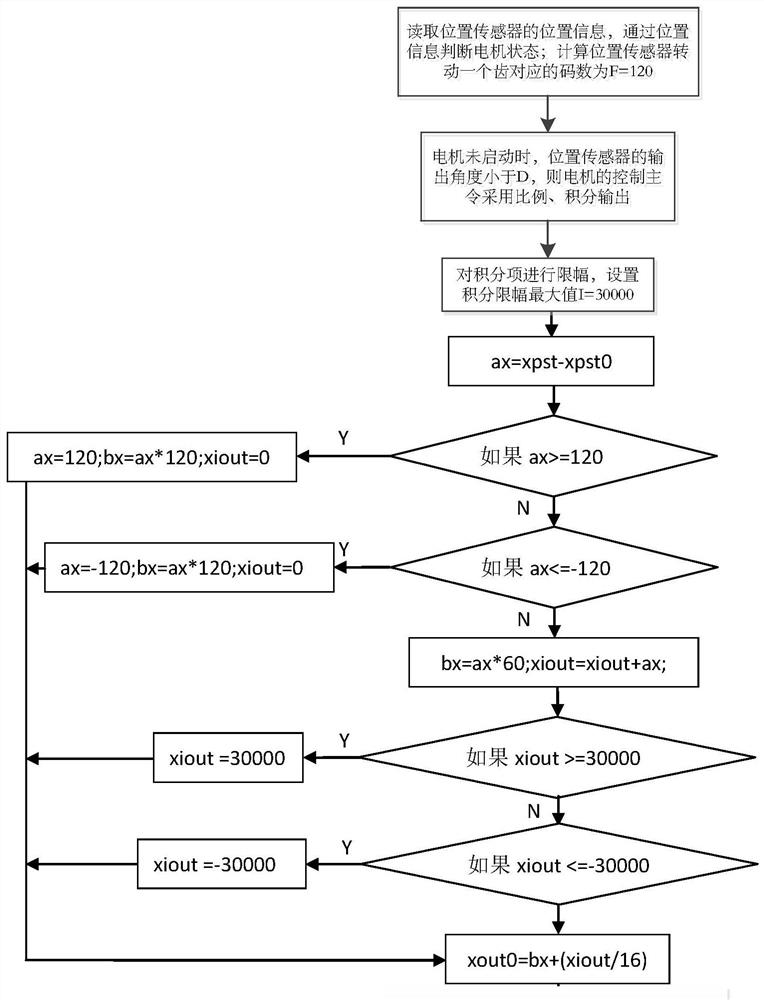
[0051] Specific control process figure 1 as shown, figure 1 Program flow chart of the control process of the heading installation angle during the motor startup process
[005...
Embodiment 2
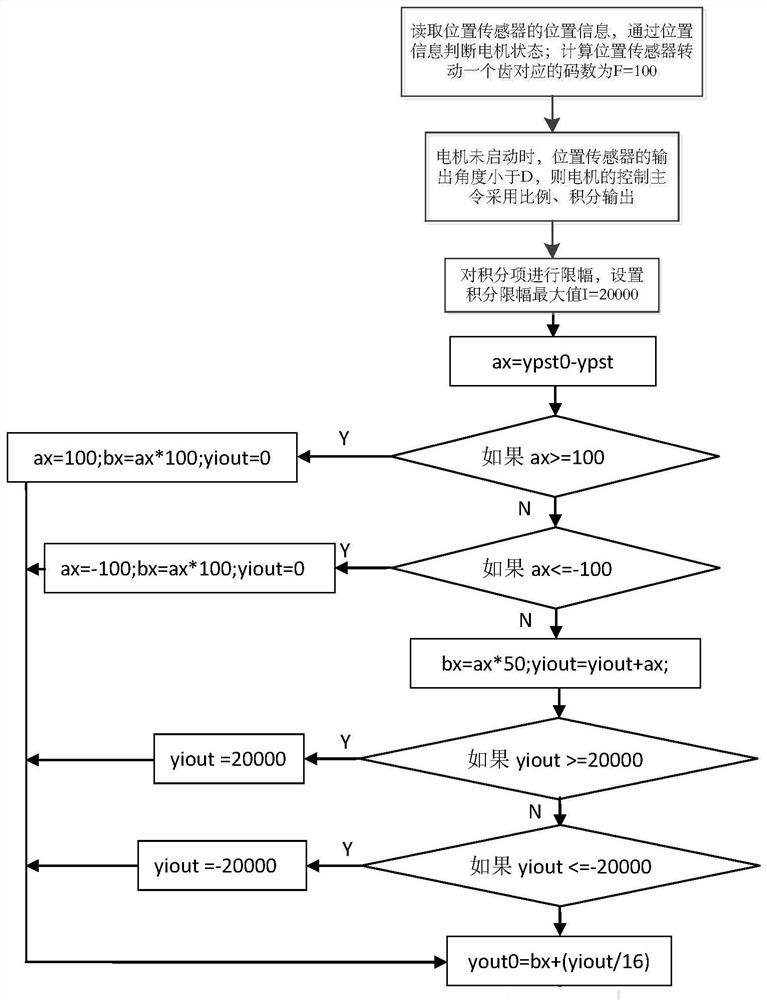
[0069] Embodiment 2, the optical cabin of the infrared imaging seeker, the pitch motor parameters are as follows:
[0070] Armature resistance (36±4.5)Ω(at 20℃)
[0071] Maximum no-load speed(r / min)
[0072] When the voltage is 60V, the no-load speed in the forward and reverse directions is (580±58)r / min.
[0073] Continuous stall torque and continuous stall voltage
[0074] When the motor is supplied with a continuous locked-rotor current of 0.64A,
[0075] Continuous stall torque ≥ 0.56N.m
[0076] The continuous locked rotor voltage is (25±2.5)V
[0077] Peak stall torque and peak stall voltage
[0078] When the peak locked rotor current is 1.54A,
[0079] Peak stall torque ≥ 1.35N.m
[0080] The peak stall voltage is (60±6)V
[0081] Stall torque sensitivity ≥ 0.875N.m / A
[0082] Starting voltage: no-load starting voltage ≤ 1.9V, forward and reverse starting voltage difference ≤ 0.15V
[0083] Torque fluctuation coefficient: ≤7%
[0084] Electrical time constant...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More