

Field programmable gate array-based (FPGA-based) multi-axis servo motor current loop control system and control method
A servo motor and current loop technology, applied in the FPGA-based multi-axis servo motor current loop control system and control field, can solve problems such as limited application, difficult multi-axis synchronous control, and inability for users to change
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
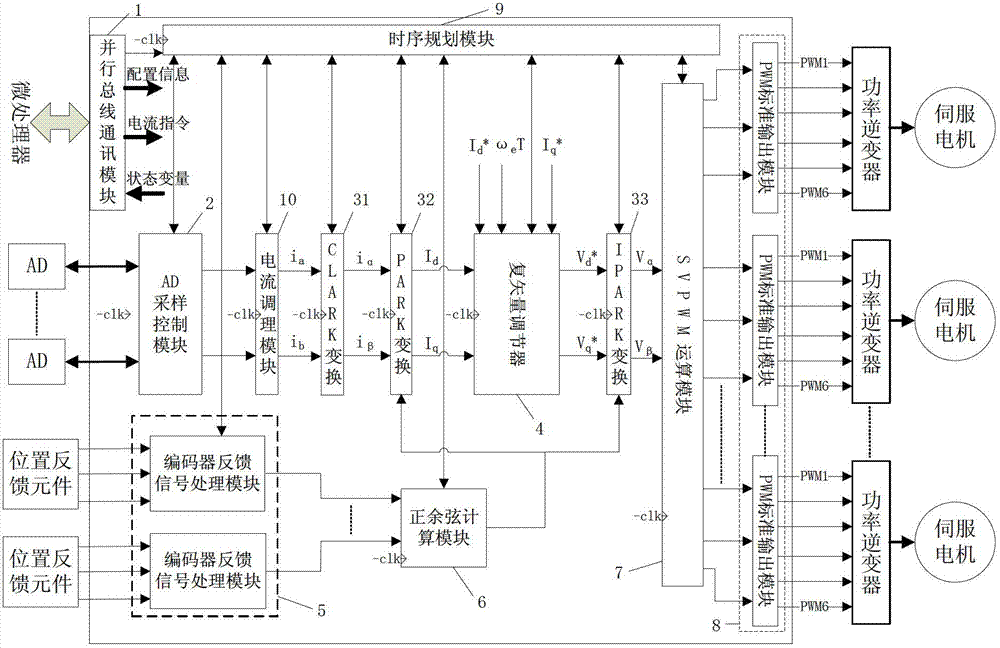
[0034] refer to figure 1 In the present invention, the control system includes a parallel bus communication module 1, an AD sampling control module 2, a vector conversion module 3, a complex vector regulator 4, an encoder feedback signal processing module 5, and a sine-cosine calculation module 6 arranged on the FPGA. SVPWM operation module 7 , PWM standard output module 8 , timing planning module 9 and current conditioning module 10 .
[0035] Parallel bus communication module 1 is used to realize communication with the microprocessor, and receive configuration information (such as regulator cont...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More