

Welding robot with automatic correction function and welding method employing same
A welding robot and robot technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., to achieve the effect of high versatility, easy-to-understand methods, and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
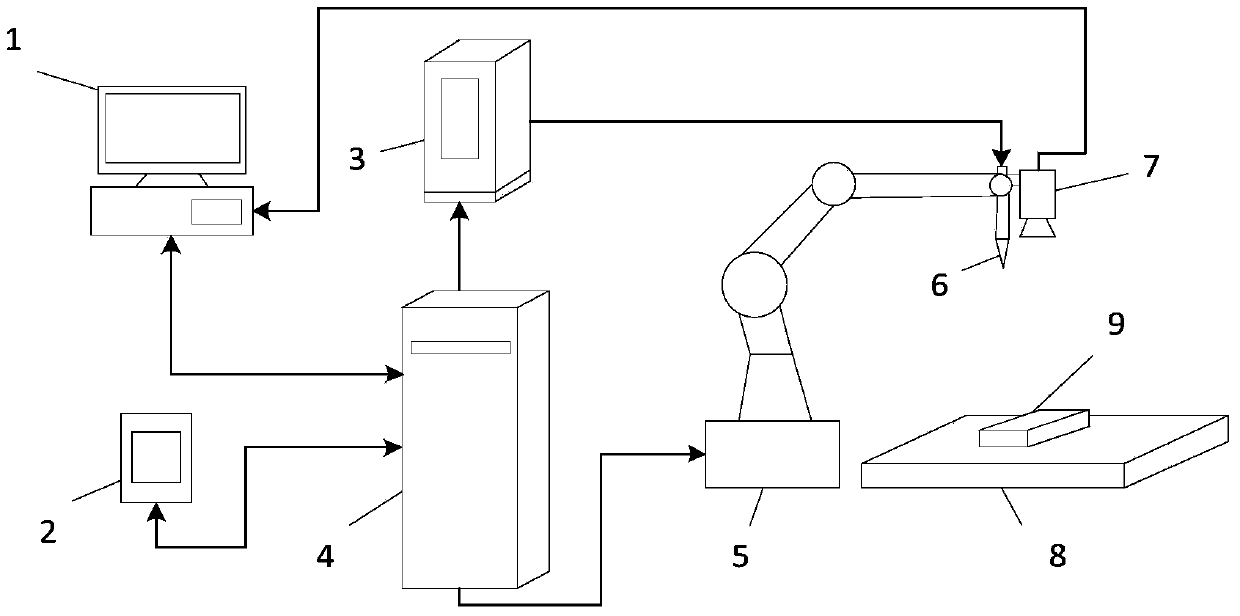
[0019] This embodiment is described in conjunction with the accompanying drawings. The system of this embodiment is composed of an industrial computer 1, a hand-held teaching device 2, a welding power supply 3, a robot controller 4, a robot 5, a welding torch 6, an industrial camera 7, and a welding platform 8. The industrial The motion data input and output ends of the computer 1 are connected with the motion data output and input ends of the robot controller 4, the control data input and output ends of the hand-held teaching pendant 2 are connected with the control data output and input ends of the robot controller 4, and the robot The power control output end of the controller 4 is connected to the control input end of the welding power supply 3, the motion control signal output end of the robot controller 4 is connected to the motion signal input end of the robot 5, and the power output end of the welding power supply 3 is connected to the welding torch 6 The power input en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More