

Laser radar-based mini-sized unmanned plane control method and system
A technology of laser radar and unmanned aerial vehicles, applied in the field of unmanned aerial vehicles, can solve the problems of inapplicability, high hardware consumption, large measurement error, etc., and achieve the effect of not being affected by ambient temperature and sunlight, strong electromagnetic interference ability, and anti-stealth ability strong effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0034] It should be noted that the embodiments in the present application and the features of the embodiments may be combined with each other in the case of no conflict.
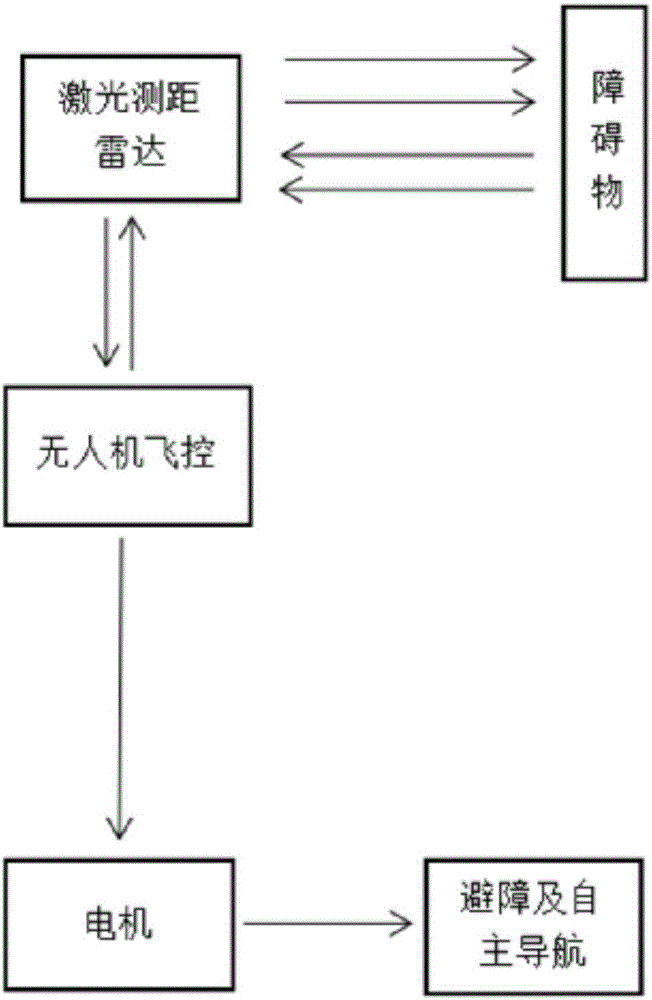
[0035] refer to figure 1 , is a schematic diagram of an unmanned aerial vehicle control system based on laser ranging radar according to an embodiment of the present invention. The UAV obstacle avoidance and autonomous navigation system consists of a laser ranging radar module and a flight control system. The laser ranging radar transmits the collected distance data and visual data to the UAV flight control system in real time. The flight control system passes the internal The central processor analyzes the data information of the ranging radar, and processes it through a variety of algorithms such as pose solving, map construction, and dynamic obstacle avoidance, and fuses it with the aircraft attitude through a special algorithm, and converts it into a motor drive signal to control the flight of the UAV. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More