Vertical speed estimation method of all-wheel drive vehicle
A technology of longitudinal vehicle speed and all-wheel drive, which is applied in the field of automobile research, can solve the problems of high model accuracy, model parameter sensitivity, complex tire model and vehicle model, and does not take vehicles into account, achieving good real-time performance, small errors, and elimination of effect of influence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] Below in conjunction with accompanying drawing, the present invention is described in more detail:
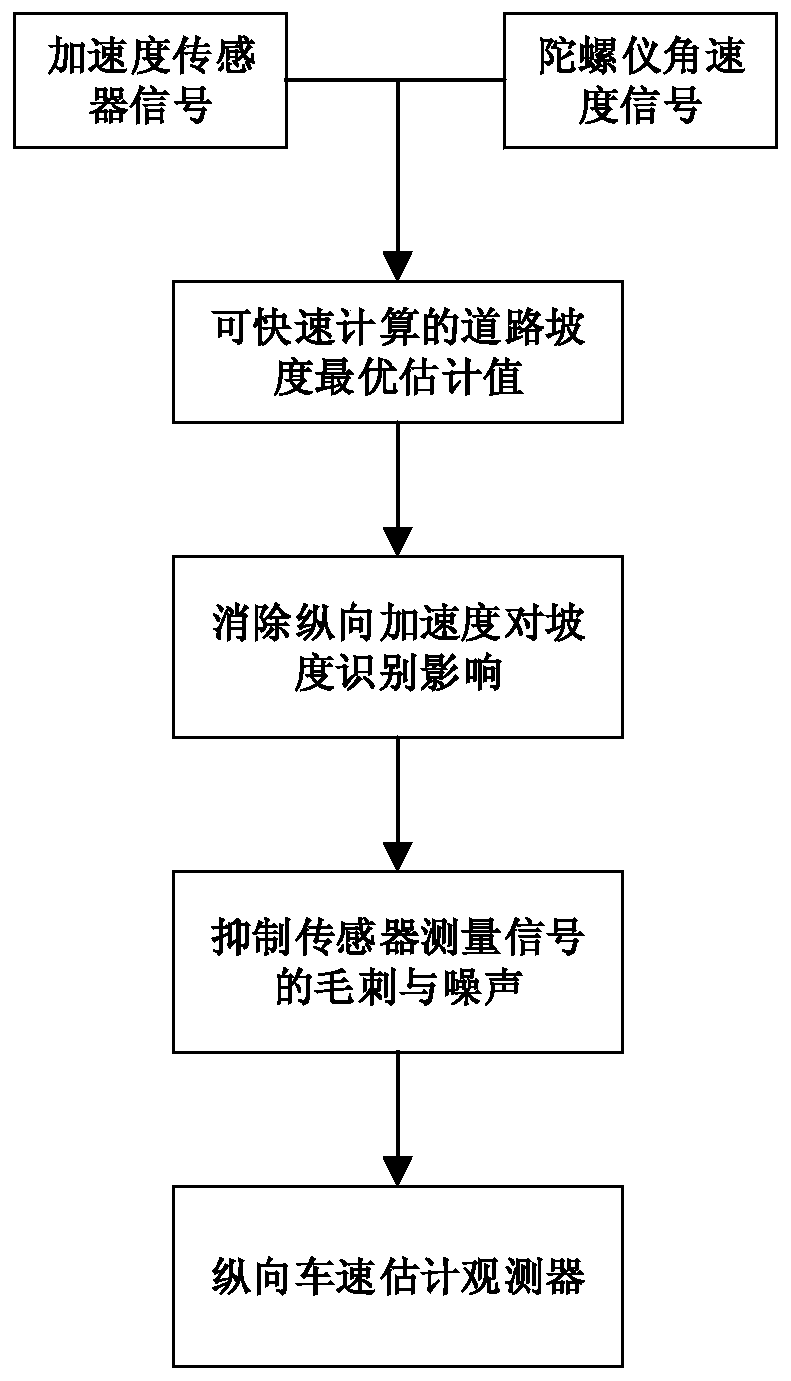
[0061] In order to solve the problem that there is no driven wheel in the driving and braking process of the all-wheel drive vehicle, and the reference speed of the vehicle cannot be obtained directly according to the speed of the driven wheel, the present invention adopts a kinematic estimation method to establish a longitudinal speed observer of the all-wheel drive system, such as figure 1 As shown, the specific steps are as follows:
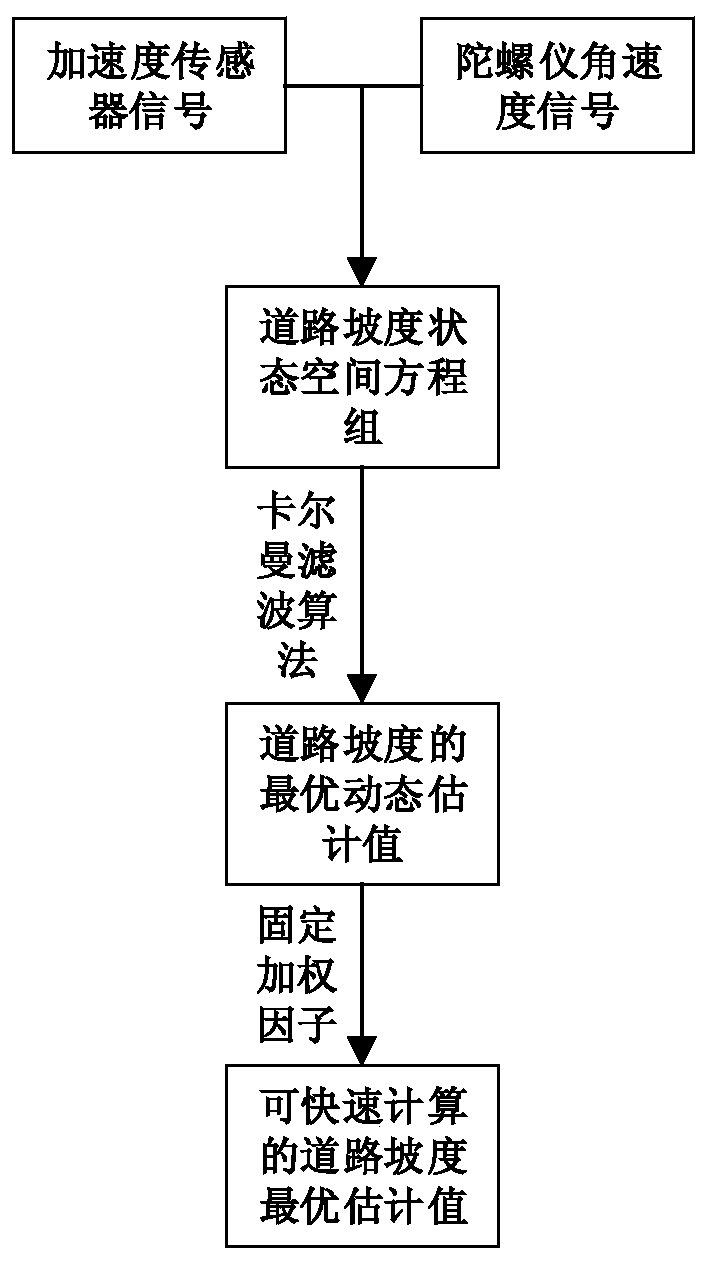
[0062] Step 1: Simplify the Kalman filter fusion algorithm to estimate the slope of the current driving road, such as figure 2 shown, including the following steps:
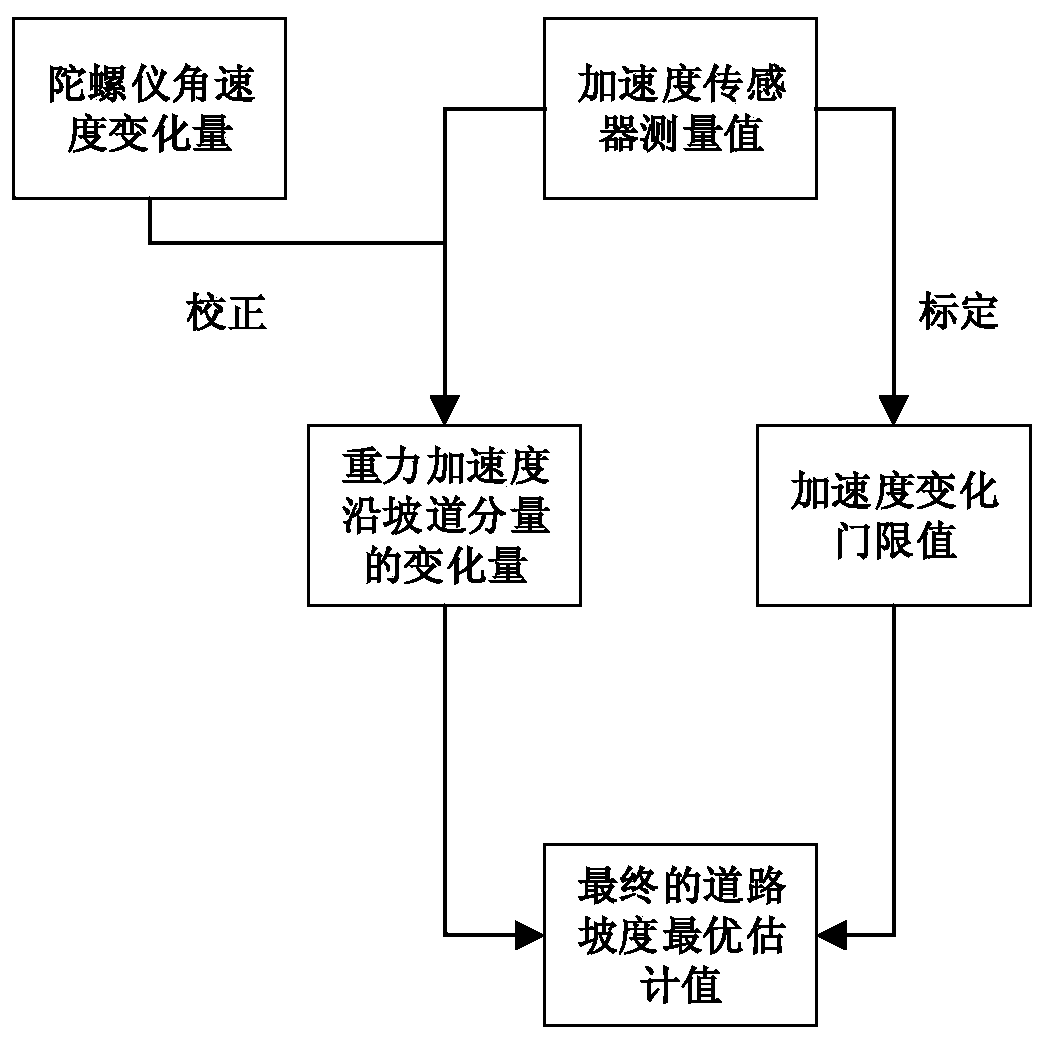
[0063] (1) According to the angular velocity signal along the Y-axis of the vehicle motion coordinate system measured by the gyroscope, the road slope prediction within the current calculation step can be realized; the output signal of the acceleration sensor is used as t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More