

Multi-robot precision machining system and method for large-aperture integral optical element
An optical element and precision machining technology, applied in the field of large-diameter integral optical element multi-robot precision machining system, which can solve the problems of high cost and long production cycle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0067] Specific Embodiment 1: This embodiment is mainly aimed at planar optical elements and optical elements with small curvature.
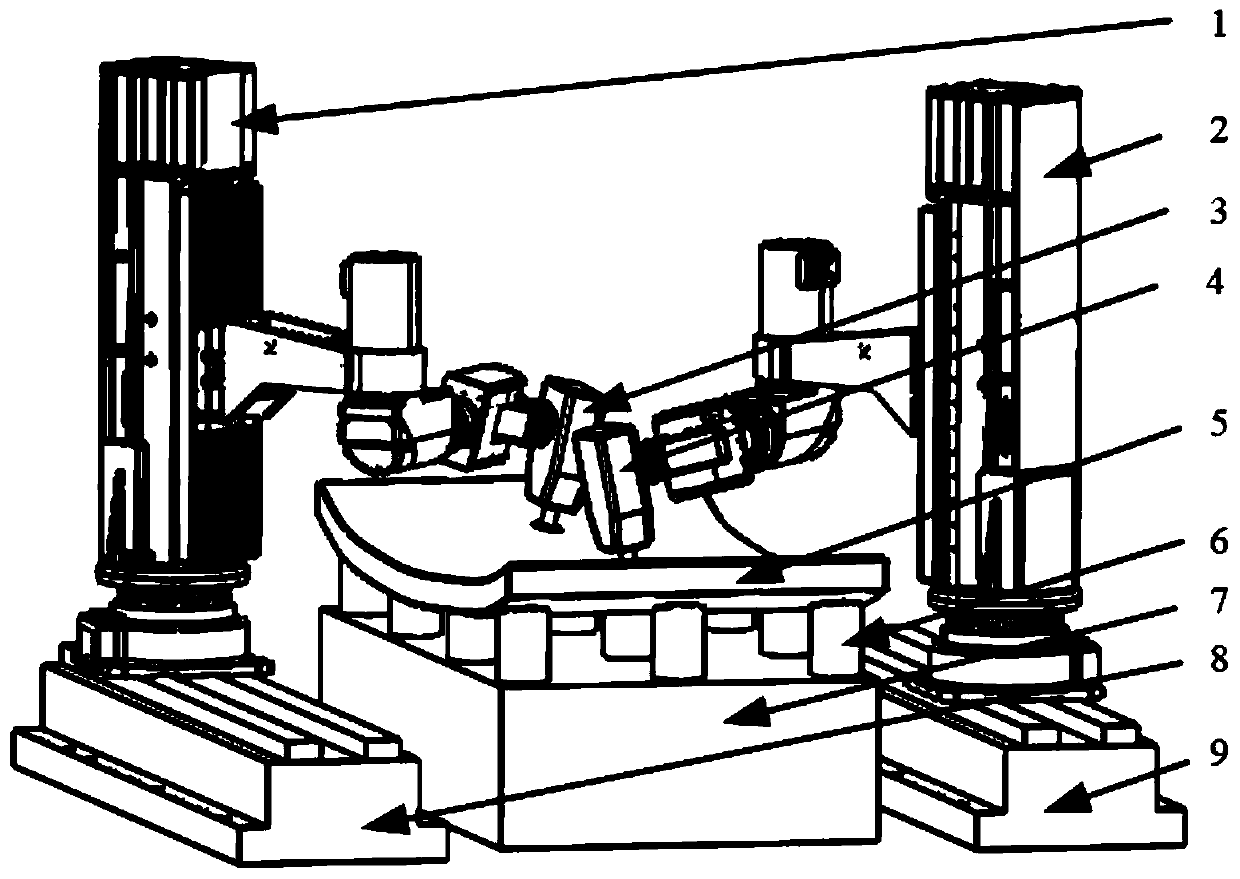
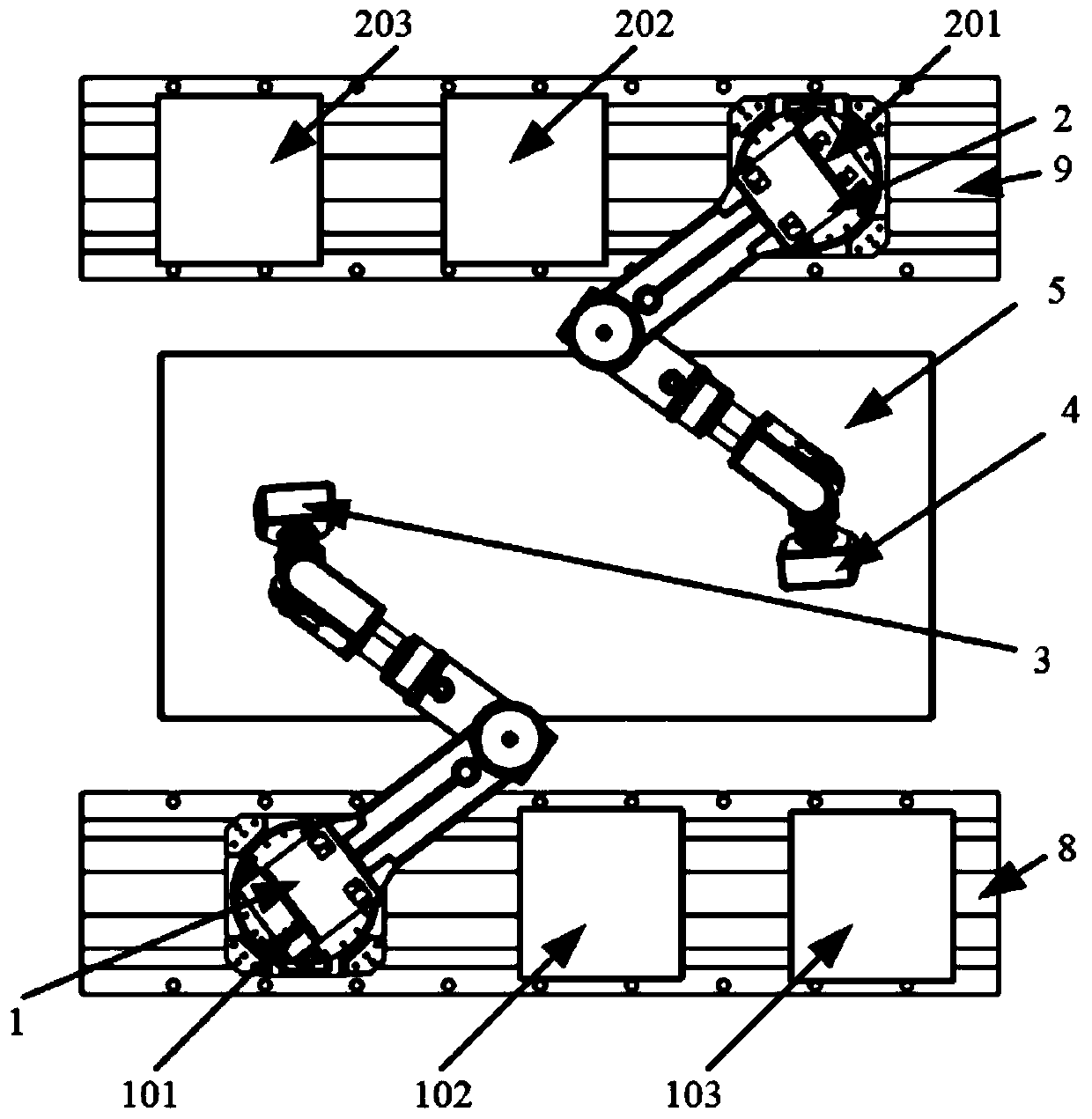
[0068] Firstly, the layout of multiple robots is determined according to the size of the optical element and the processing range of a single robot. The optical element in the specific embodiment 1 can realize the entire optical element 5 by changing the position of the robot on the corresponding slide rail among the two robots. Surface coverage. The first robot 1 and the second robot 2 are symmetrically arranged on both sides of the optical element 5, and a single robot can process half of the optical element. The first robot 1 and the second robot 2 can be positioned on the first robot positioning guide rail 8 and the second robot positioning Slide on the guide rail 9.
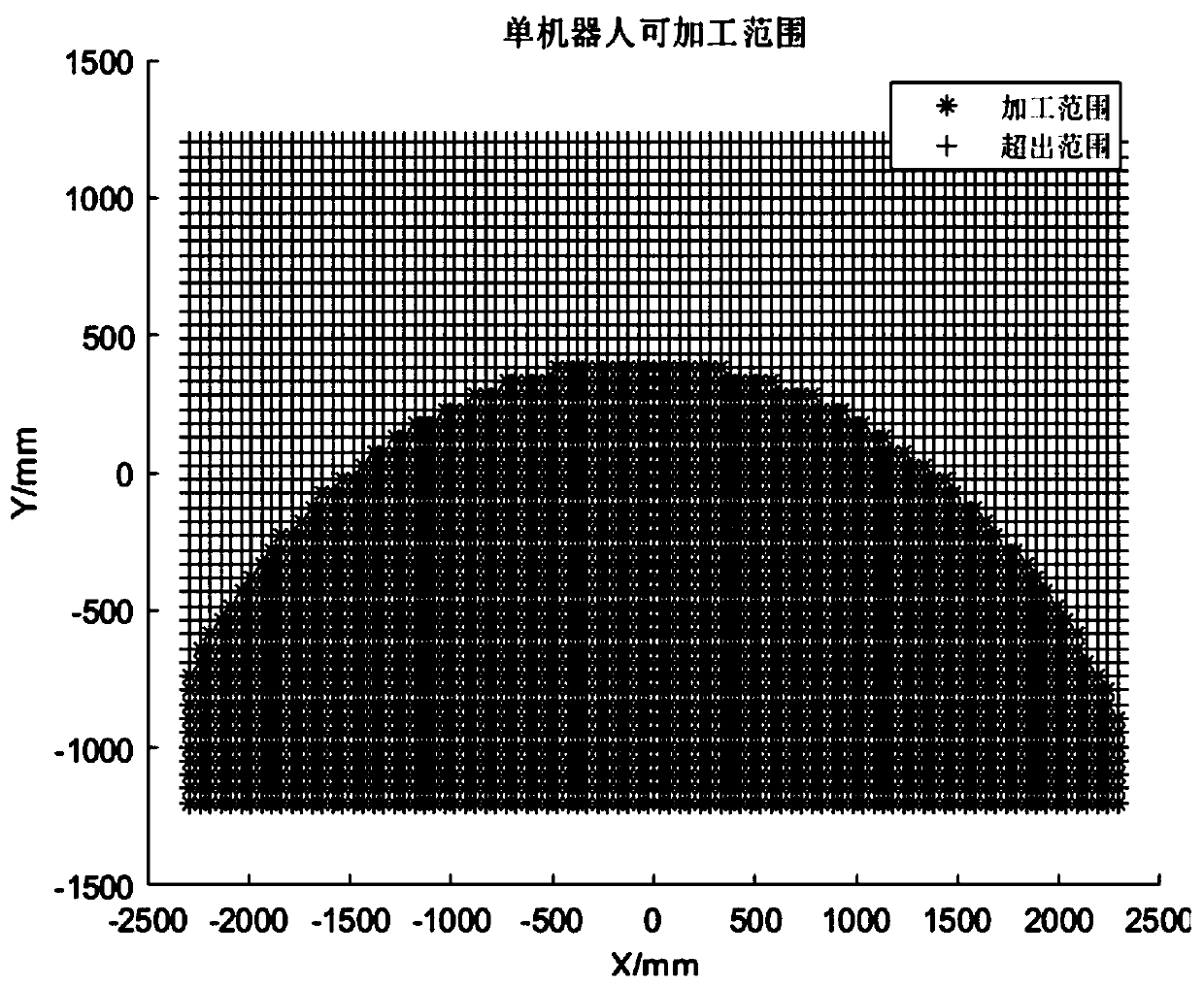
[0069] Further, according to the machinable range of a single robot, calculate and determine the stations required to cover one side of the optical element 5. The double-stat...
specific Embodiment approach 2
[0088] Embodiment 2: This embodiment is mainly aimed at the processing of optical elements with large curvature, and the working mode and processing method of Embodiment 2 are the same as Embodiment 1. Because the curvature of the optical element 5 is relatively large, its grinding process needs to adopt a large-curvature grinding part 334. The grinding square of the large-curvature grinding part 334 is small and the grinding square of the curvature grinding part 335 is small. Under the deformation of the flexible layer 332 of the grinding disc, It can better adapt to large curvature changes on the surface of the element, and has a better fit with the surface of the optical element 5 .
[0089] The used polishing liquid is supplied to the polishing pad 3312 of the recovery tool head module and replaced with a thicker polishing pad, so as to adapt to the curvature change of the large curvature optical element 5 .
[0090] The magnetorheological polishing tool head module adopte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More