Mobile robot indoor positioning mapping method based on multi-sensor fusion
A multi-sensor fusion and mobile robot technology, applied in the field of intelligence, can solve problems such as poor indoor environmental conditions, long algorithm running time, unstable robot movement speed, etc., and achieve the effect of reducing the number of particles and alleviating particle dissipation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0031] A method for indoor positioning and mapping of a mobile robot based on multi-sensor fusion of the present invention, the specific implementation method includes the following steps:
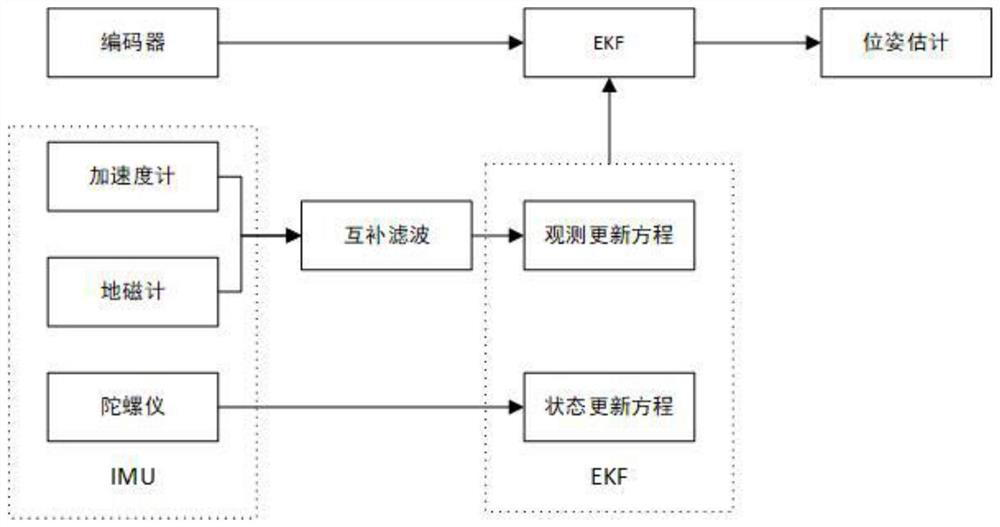
[0032] Step 1: Fusion of odometer and IMU data, using the EKF method to fuse the odometer and IMU data to establish a robot motion model;
[0033] In the working environment, the robot SLAM algorithm calculates the linear velocity and angular velocity of the robot through the encoder to obtain the real-time pose of the robot. Because the encoder-based odometer motion model will produce certain errors due to tire slip and drift, the errors will increase with time [11]. The IMU sensor is composed of an accelerometer, a magnetometer, and a gyroscope, which can provide stable robot attitude information. This paper uses the characteristics of high precision and fast response of the IMU sensor in a short period of time to correct the odometer error.
[0034] For mobile robots, the collected whe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



