

Force and position mixed type grinding tool with automatic protection function
A grinding tool and automatic protection technology, which is applied in the direction of manufacturing tools, grinding automatic control devices, and workpiece feed movement control, can solve the problems of environmental and human hazards, long lag time, and easy vibration, etc. Damage to equipment, effects of resolving splashes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The specific implementation manners of the present invention will be described below in conjunction with the drawings and embodiments.
[0027]
[0028] This embodiment provides a force-position hybrid grinding tool with automatic protection, which is used as an end effector of a robot to perform flexible grinding on a workpiece.
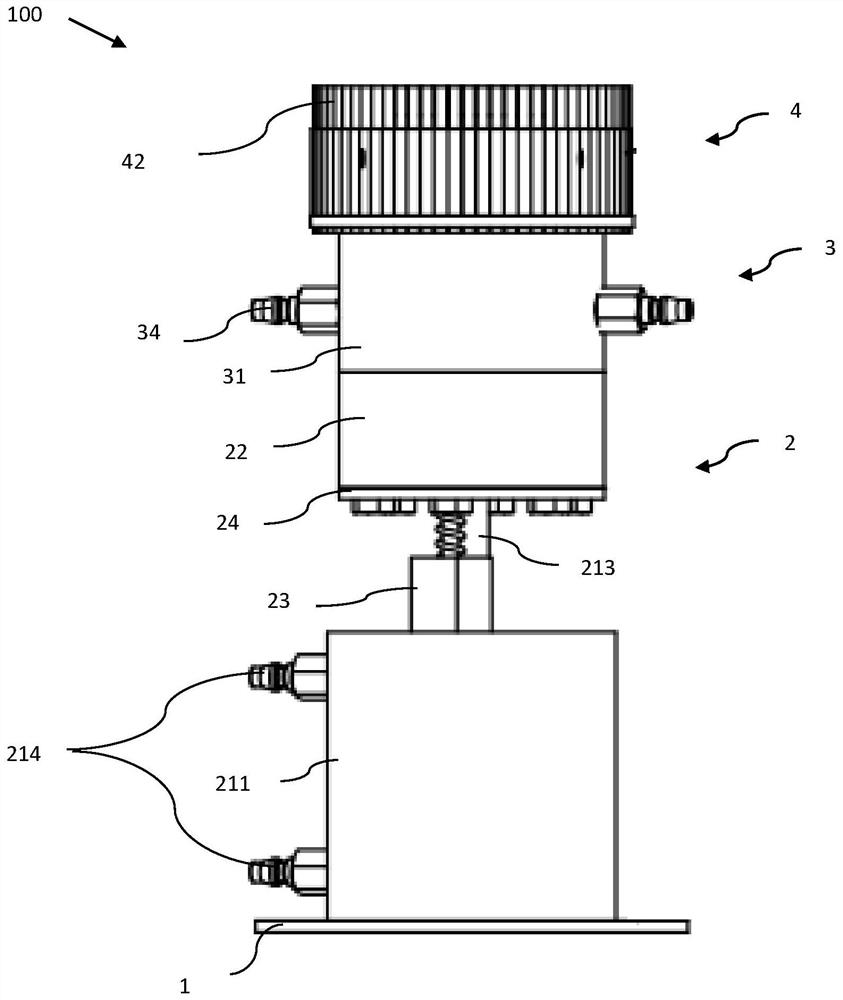
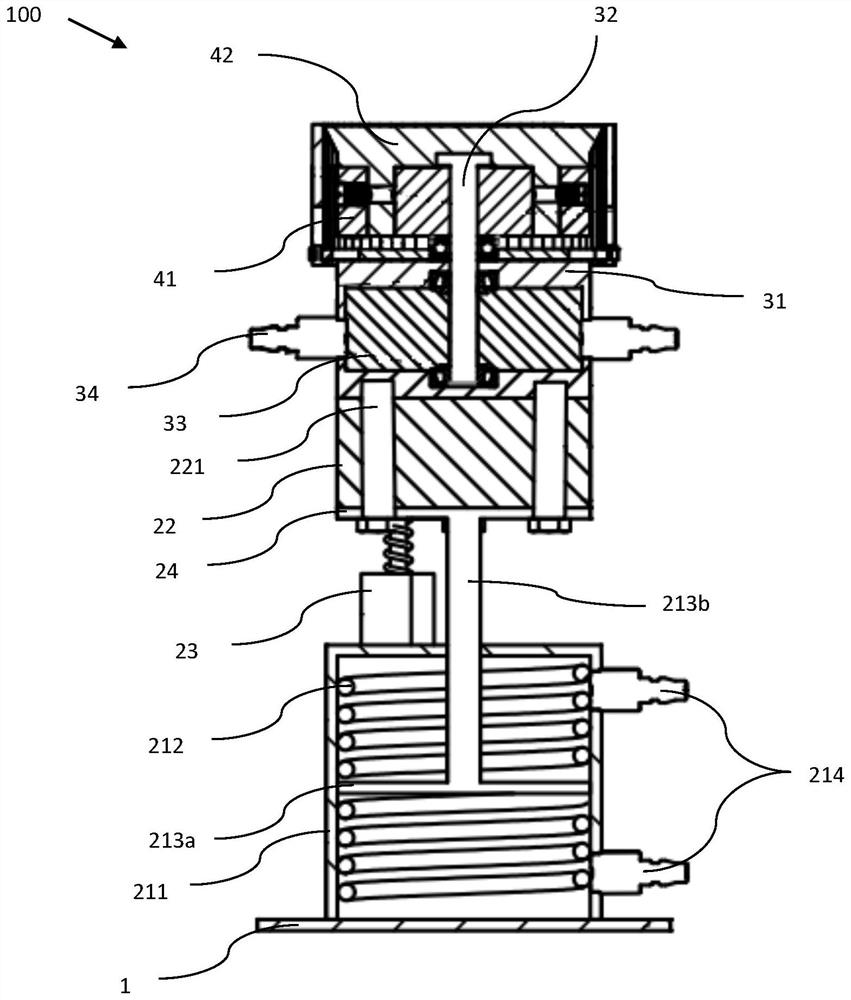
[0029] figure 1 It is a schematic diagram of the overall structure of the force-position hybrid grinding tool with automatic protection in the embodiment of the present invention; figure 2 It is a schematic cross-sectional view of the force-position hybrid grinding tool with automatic protection in the embodiment of the present invention.
[0030] Such as figure 1 and figure 2As shown, the force-position hybrid grinding tool 100 with automatic protection provided in this embodiment includes a manipulator (not shown in the figure), a fixed platform base 1, a force-position control device 2, a pneumatic device 3, a grinding device 4 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More