

Model-free adaptive robust decoupling control method for two-motor speed control system
A model-free self-adaptive and motor speed regulation technology, which is applied in motor control, motor generator control, electronic commutation motor control, etc., can solve problems such as lack of decoupling effect, wear and tear, and difficulty in obtaining accurate mathematical models. Achieve the effects of solving poor load immunity, scalable system performance, and improving estimation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The specific implementation manner of the present invention will be further described below in conjunction with the accompanying drawings.
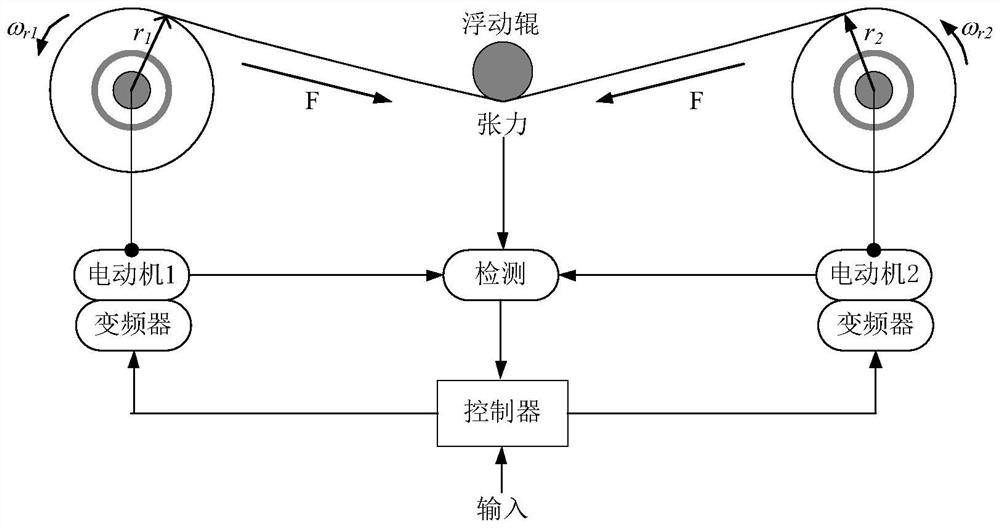
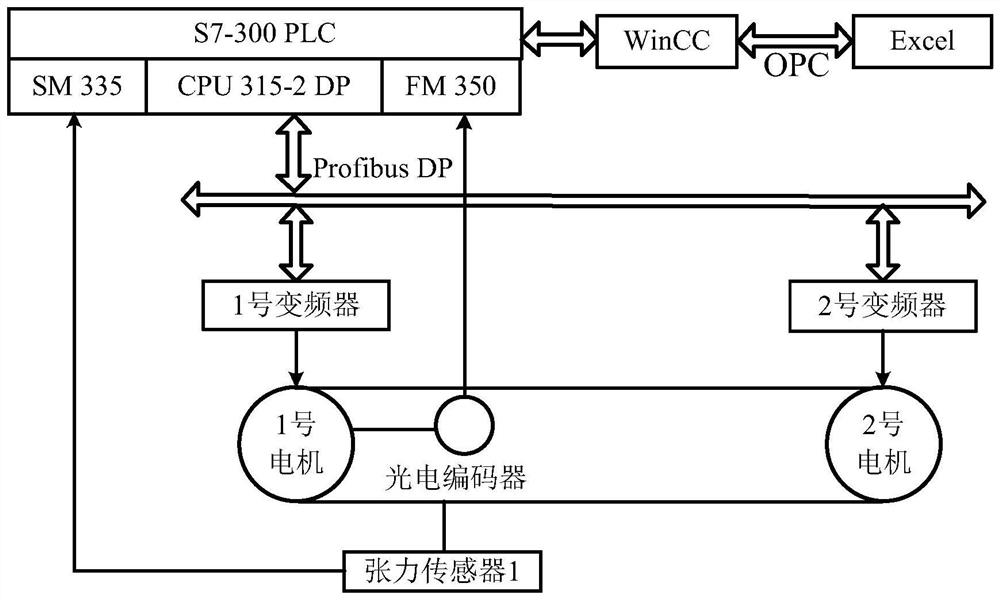
[0071] Step 1: Two sets of rolls are respectively driven by two squirrel-cage AC asynchronous motors, the motor shaft and the rolls are rigidly connected, and the speed signal u is transmitted by the Siemens S7-300PLC through the Profibus bus 2 , u 4 It is transmitted to the frequency converter for vector control, thus forming a two-motor speed control system; the driving part of the two-motor speed control experimental system is mainly composed of two MMV440 frequency converters and two 2.2KW three-phase cage asynchronous motors, which control the drive roller shafts respectively make the belt transport as figure 1 As shown; the control part is mainly composed of Advantech industrial computer and Siemens PLC300, the PLC control unit includes power supply module (PS 307 10A), CPU module (315-2DP), digital input / output module (SM32...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More