

Passive positioning mechanical arm for propelling mechanism of endovascular intervention surgical robot
A surgical robot and passive positioning technology, which is applied in the field of medical devices, can solve the problems of increased burden on the operating table due to heavy weight, dependence on the patient's legs, and heavy base weight, etc., to increase the effective operating space, reduce the exposed distance of the catheter, and facilitate the operation. The effect of the doctor's operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention will be described in detail below with reference to the accompanying drawings and examples.
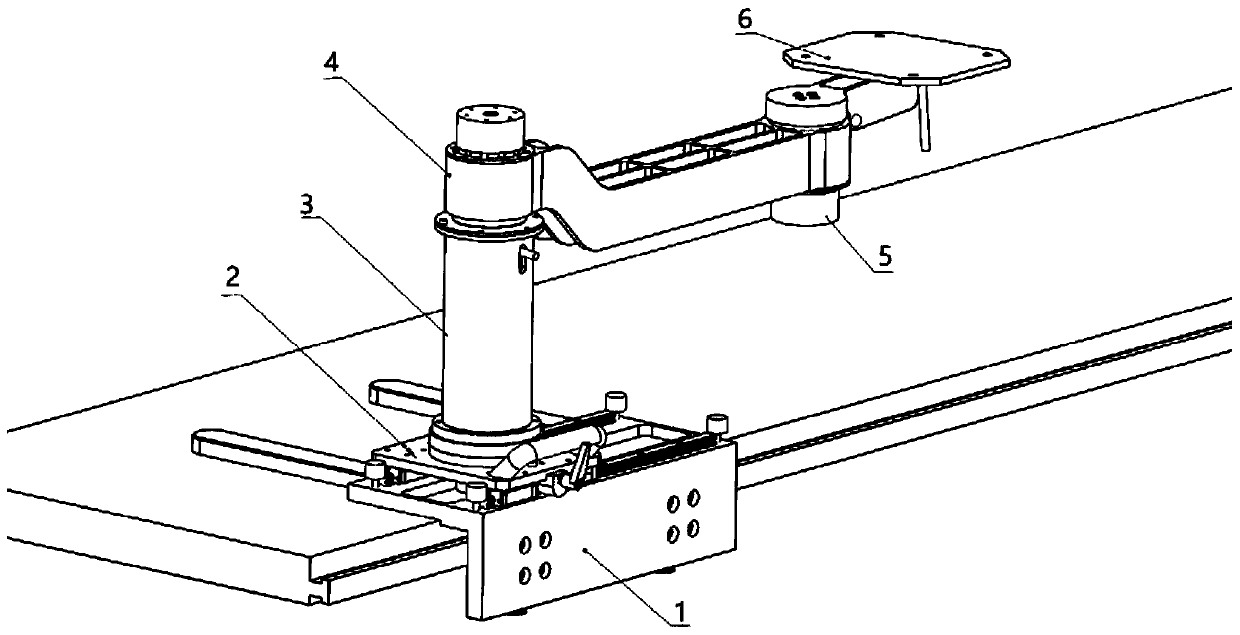
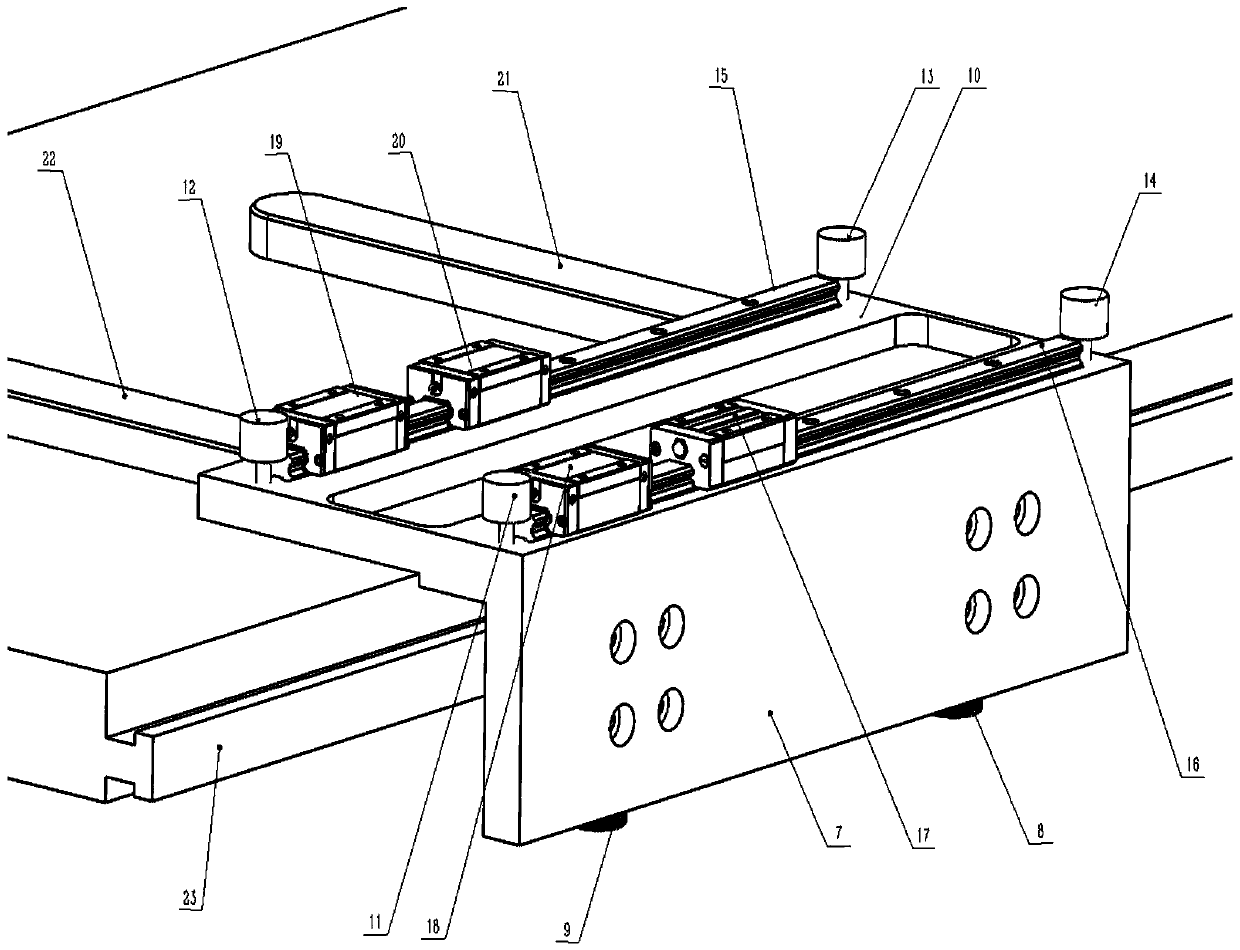
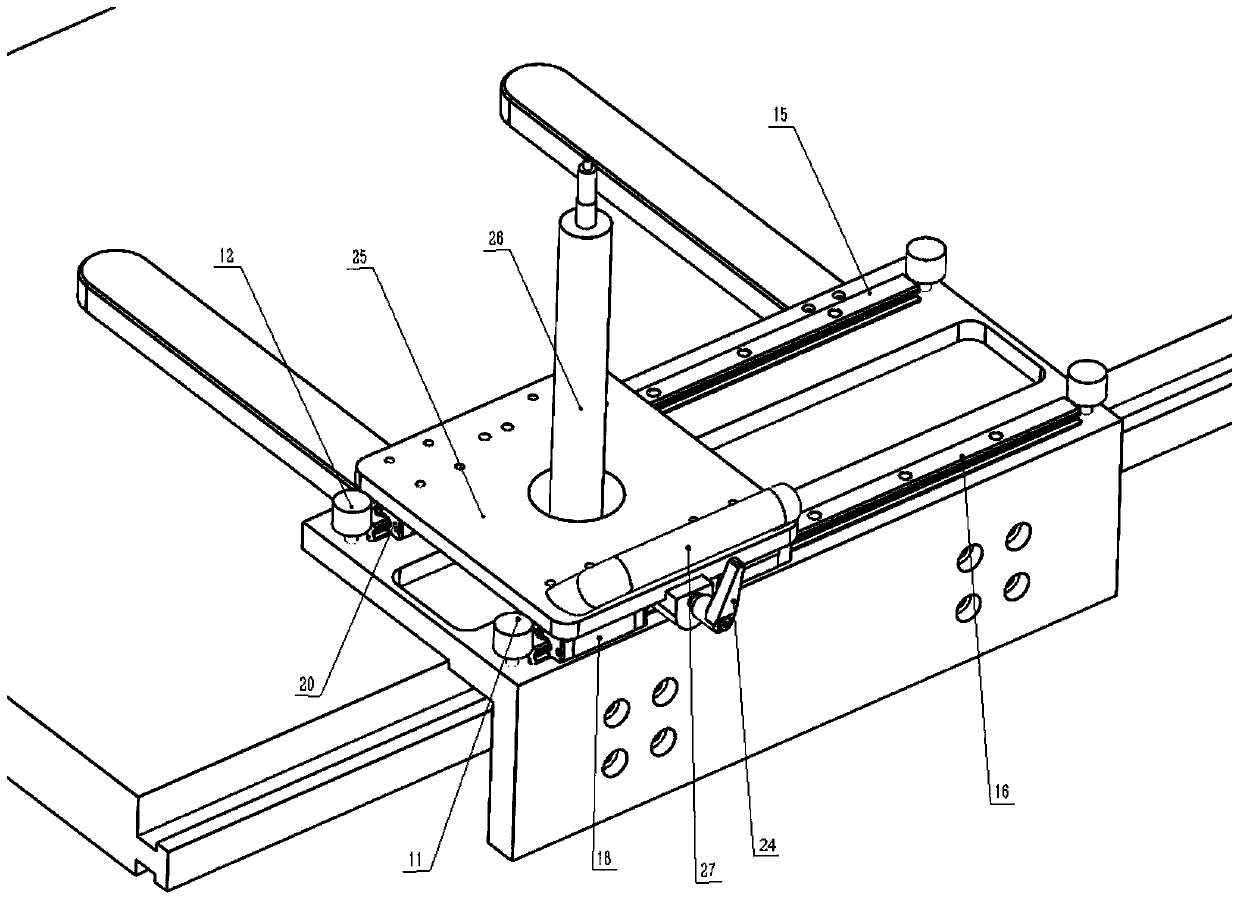
[0074] This embodiment provides a passive positioning mechanical arm for the propulsion mechanism of a robot for intravascular interventional surgery, the mechanical arm is installed on the operating table 23; see the attached figure 1 , the mechanical arm includes: a base module 1, a horizontal movement module 2, a lifting module 3, a first rotary joint 4, a second rotary joint 5 and a pitch angle adjustment module 6;
[0075]The base module 1 is installed on the operating table, the horizontal movement module 2 is installed on the base module 1, the bottom of the lifting module 3 is installed on the horizontal movement module 2, and one end of the first rotary joint 4 is installed on the lifting The top of the module 3, the other end is connected with one end of the second rotary joint 5; the pitch angle adjustment module 6 is installed on the other end ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More