

Rapid visual orientation and remote monitoring system and method based on embedded mobile robot
A mobile robot and visual positioning technology, applied in the general control system, control/regulation system, program control, etc., can solve the problems of reducing the real-time positioning of mobile robots, the large amount of calculation of the SIFT algorithm, and the huge structure of the robot system. Low power consumption, short matching time and small size effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
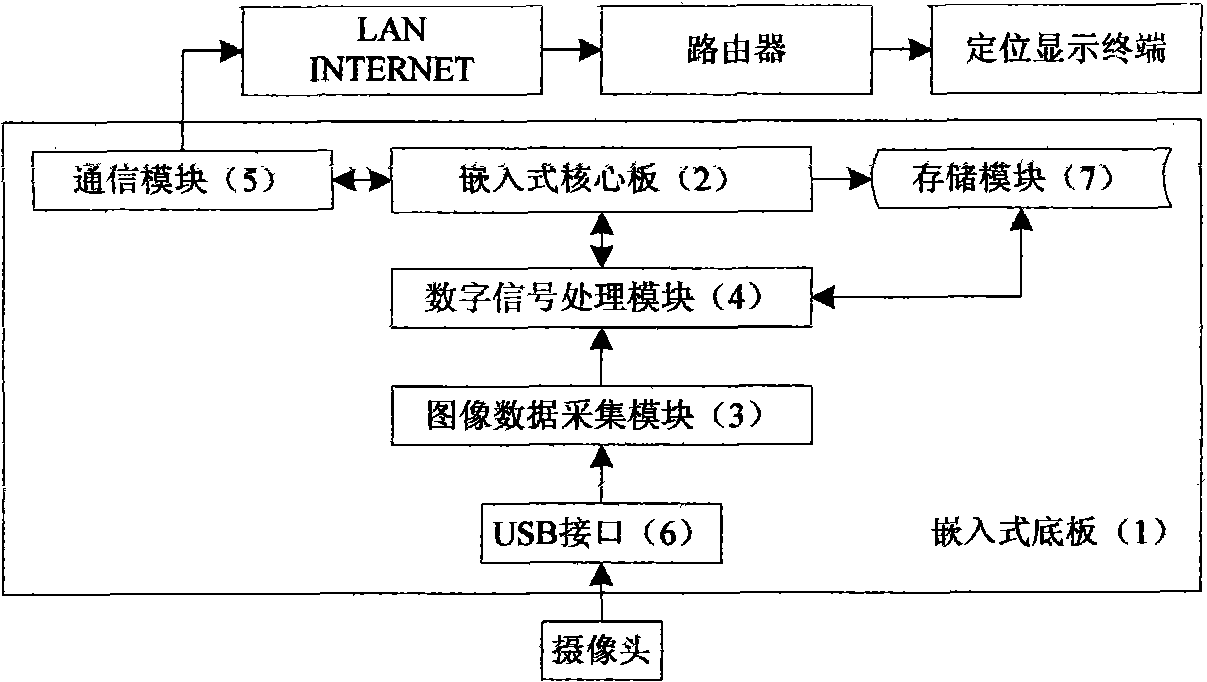
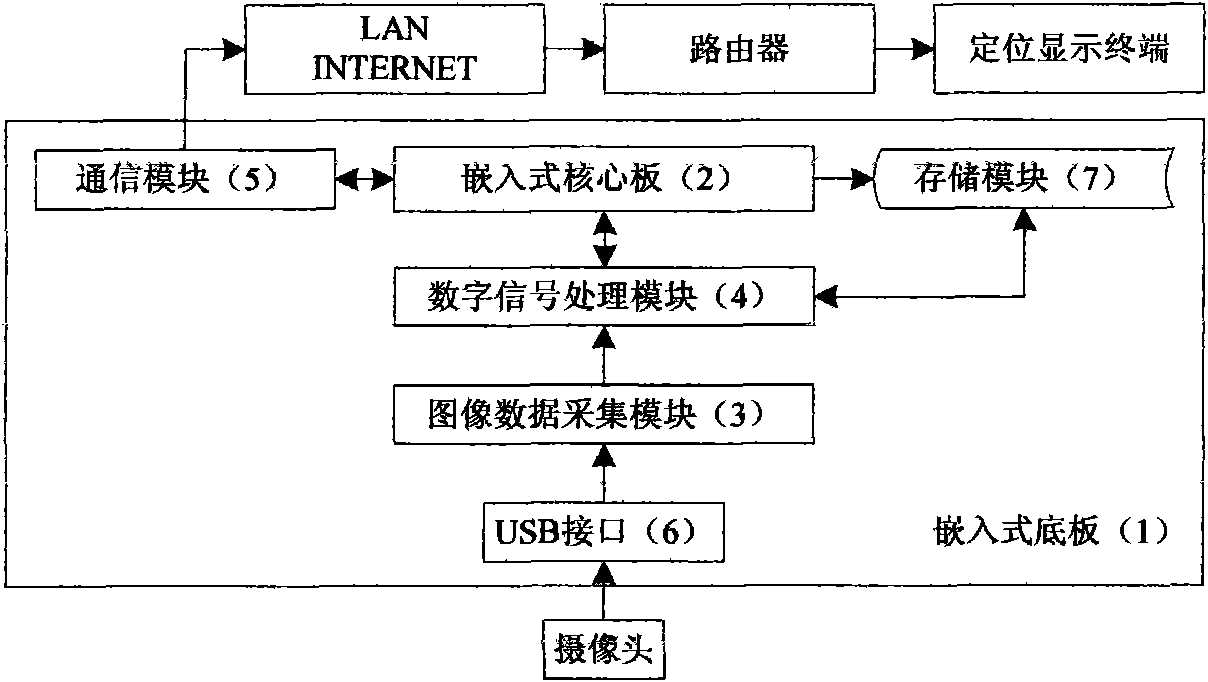
[0030] Depend on figure 1 It shows the fast vision positioning and remote monitoring system based on embedded mobile robot, which includes: embedded base board (1), embedded core board (2), image data acquisition module (3), digital signal processing module (4), A communication module (5), a USB interface (6), a storage module (7), a camera (8) and a positioning display terminal (9), wherein: an ARM (advanced RISC machines) architecture based on the embedded chassis (1) is set Embedded core board (2), CCD / CMOS image data acquisition module (3) with video decoding function, digital signal processing module (4) based on DSP (digital signal processor), wireless communication module (5), USB interface (6) and storage module (7), camera (8) is connected with USB interface (6) on the embedded base plate (1), and the signal input end of image data acquisition module (3) is connected to USB interface (6); The collected image data is sent to the digital signal processing module, which...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More