

A passive wireless robotic gripper based on a mechanical metamaterial structure
A passive wireless and metamaterial technology, applied in manipulators, micro manipulators, manufacturing tools, etc., to achieve high precision, small size, and strong reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings.
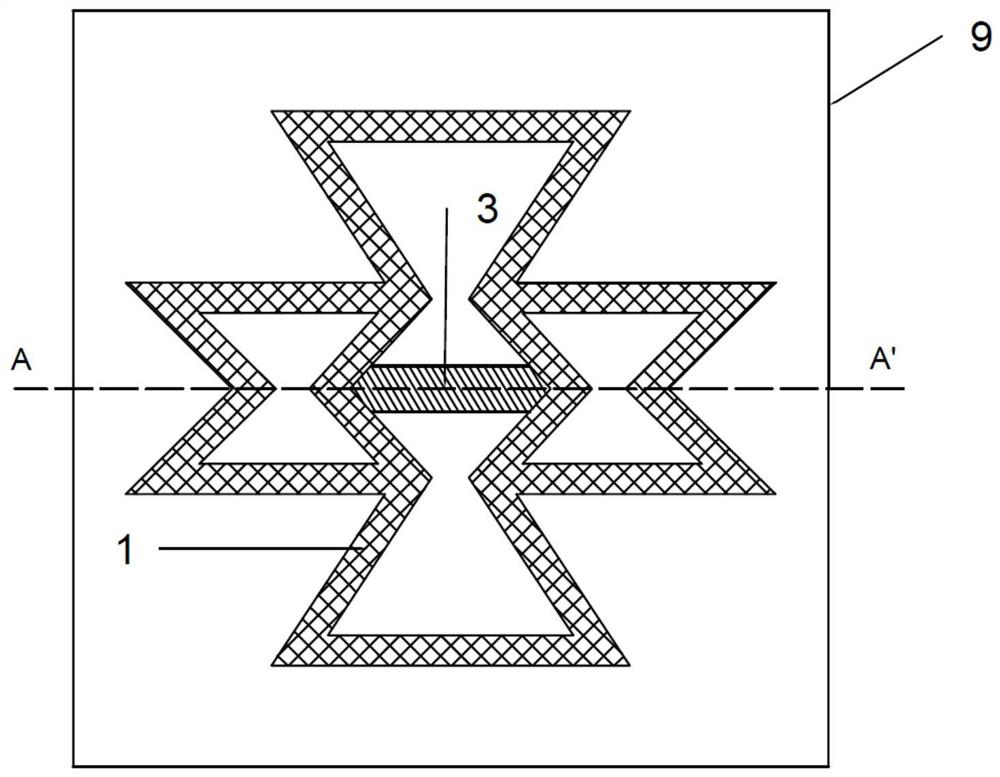
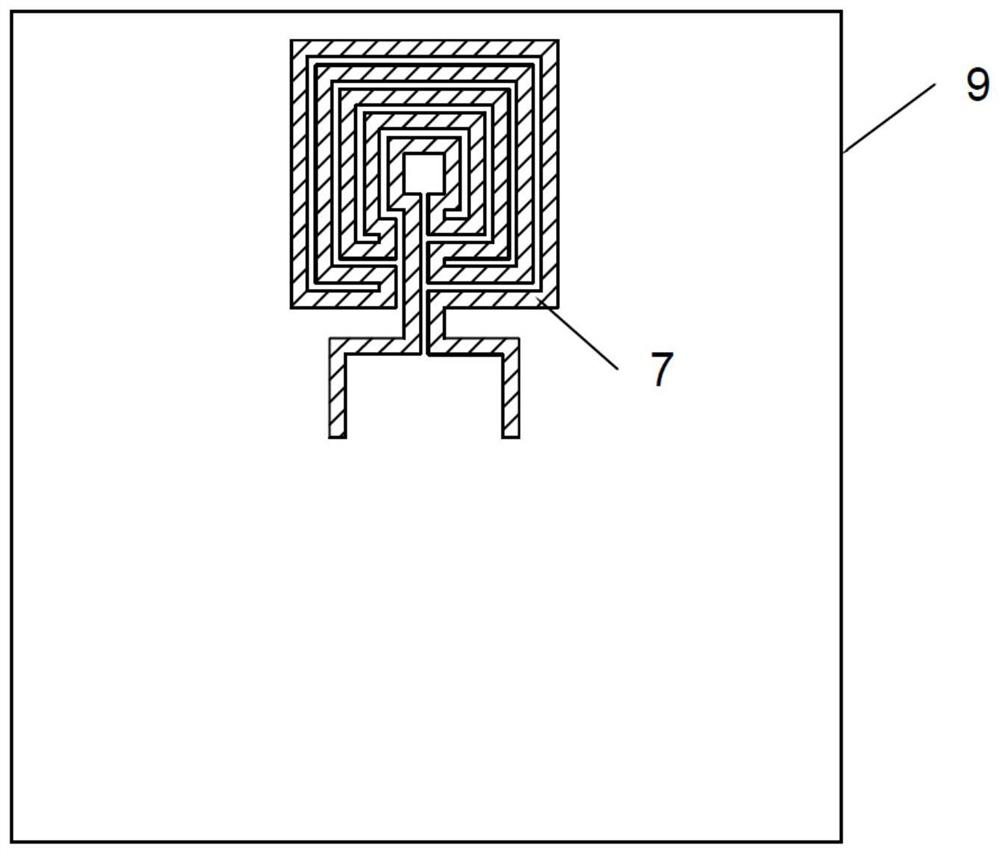
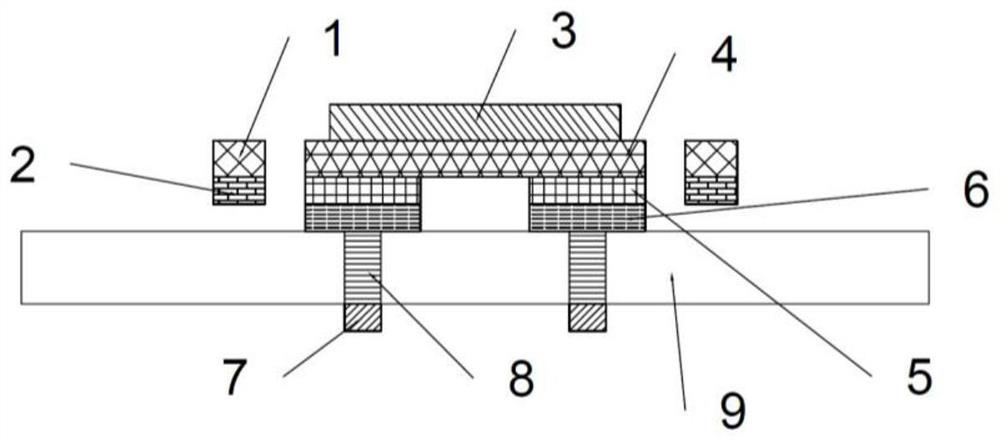
[0020] see figure 1 , figure 2 and image 3 , the present invention provides a passive wireless machine gripper based on a mechanical metamaterial structure, comprising a graphene oxide layer 1 of a mechanical metamaterial structure, a graphene layer 2 of a mechanical metamaterial structure, a capacitor upper plate 3, a dielectric Layer 4, capacitor lower plate 5, anchor region 6, planar inductor 7, through hole 8, substrate 9; the graphene layer 2 of the mechanical metamaterial structure is located below the graphene oxide layer 1 of the mechanical metamaterial structure to form a double-layer mechanical superstructure Material structure, the double-layer mechanical metamaterial structure is located on the front of the substrate 9, and the center of the mechanical metamaterial structure is a pressure-sensitive capacitor, which consists of the capacitor upper plate ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More