

Bearing-free asynchronous motor RBF neural network self-adaptive inverse decoupling control and parameter identification method
A technology of asynchronous motor and neural network, applied in the field of high-performance control, to achieve the effects of no need for lubrication and sealing, long life and wide application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
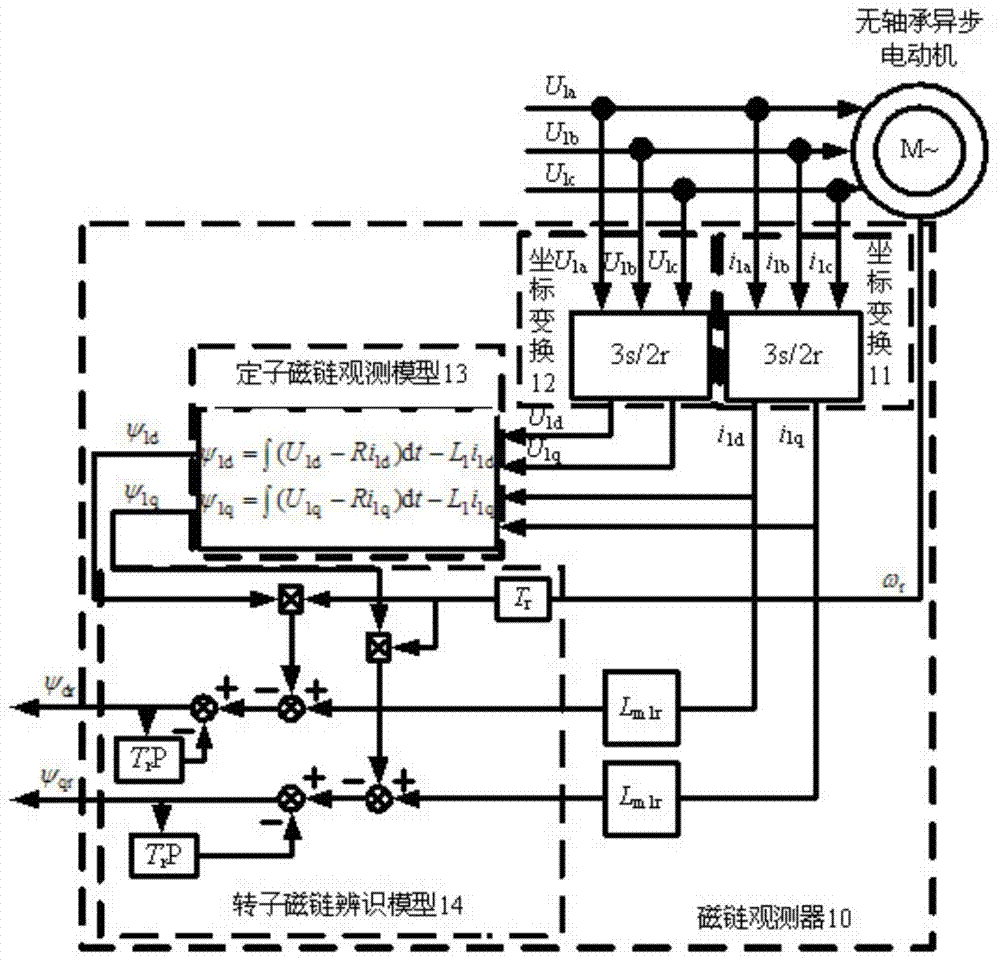
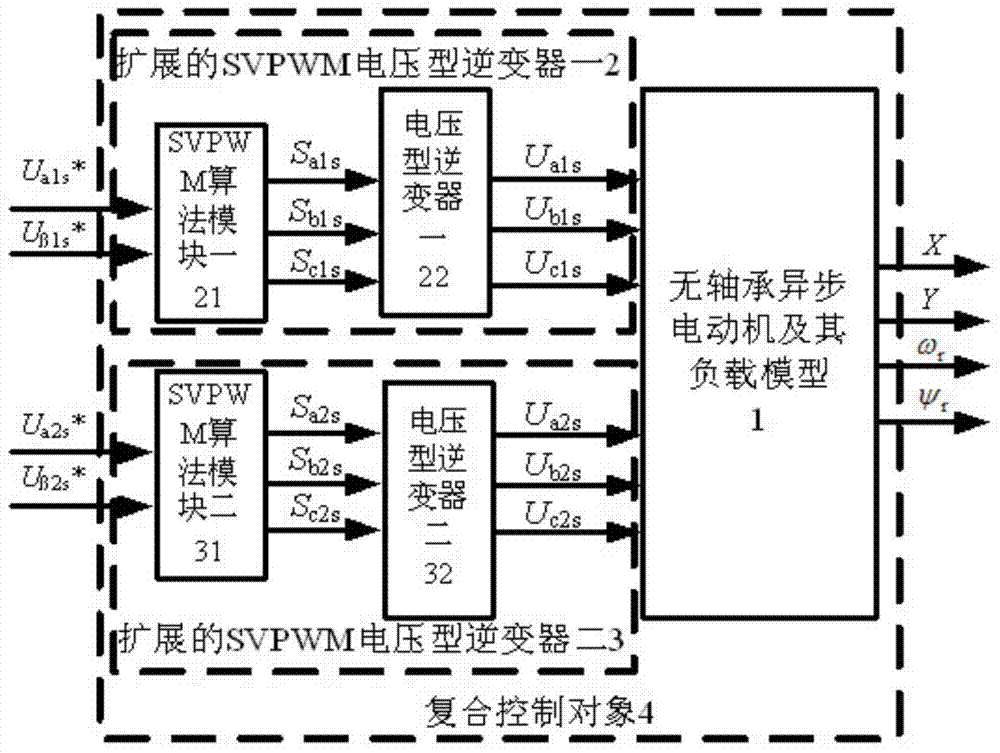
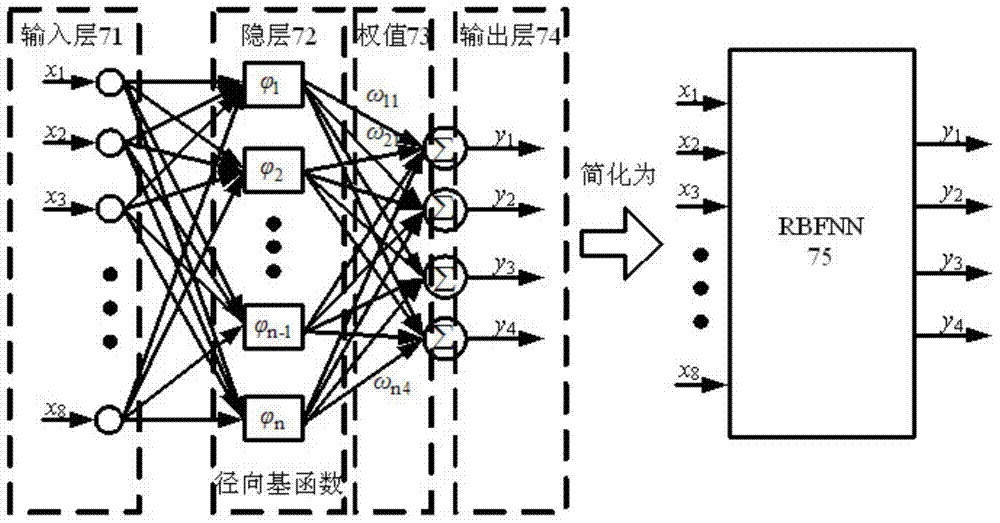
[0048] Embodiments of the present invention are as follows: first, a flux observer composed of a commonly used current, voltage, speed, flux observation model and Park transformation and Clark transformation is used to estimate the rotor flux of the bearingless asynchronous motor required for the flux linkage closed loop. chain information. The two SVPWM and voltage-type inverter modules, as well as the bearingless asynchronous motor and its load model are taken as a whole to form a composite controlled object. The controlled variables of the composite controlled object are the rotor radial displacement and rotational speed of the bearingless asynchronous motor and flux linkage; a RBF neural network is used to construct the inverse controller of the compound controlled object, and the input of the inverse controller is the error signal of the given signal and the feedback signal to form a closed loop; in addition, an RBF neural network RBFNNI is used to realize the speed contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More