

Active disturbance rejection controlling method of attitude and track of neutral buoyancy robot
An active disturbance rejection control and robot technology, which is applied to the attitude and trajectory control of neutral buoyancy robots. In the field of attitude and trajectory active disturbance rejection control of neutral buoyancy robots in complex water environments, it can solve complex nonlinear and execution saturation, insufficient anti-interference ability, system performance degradation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
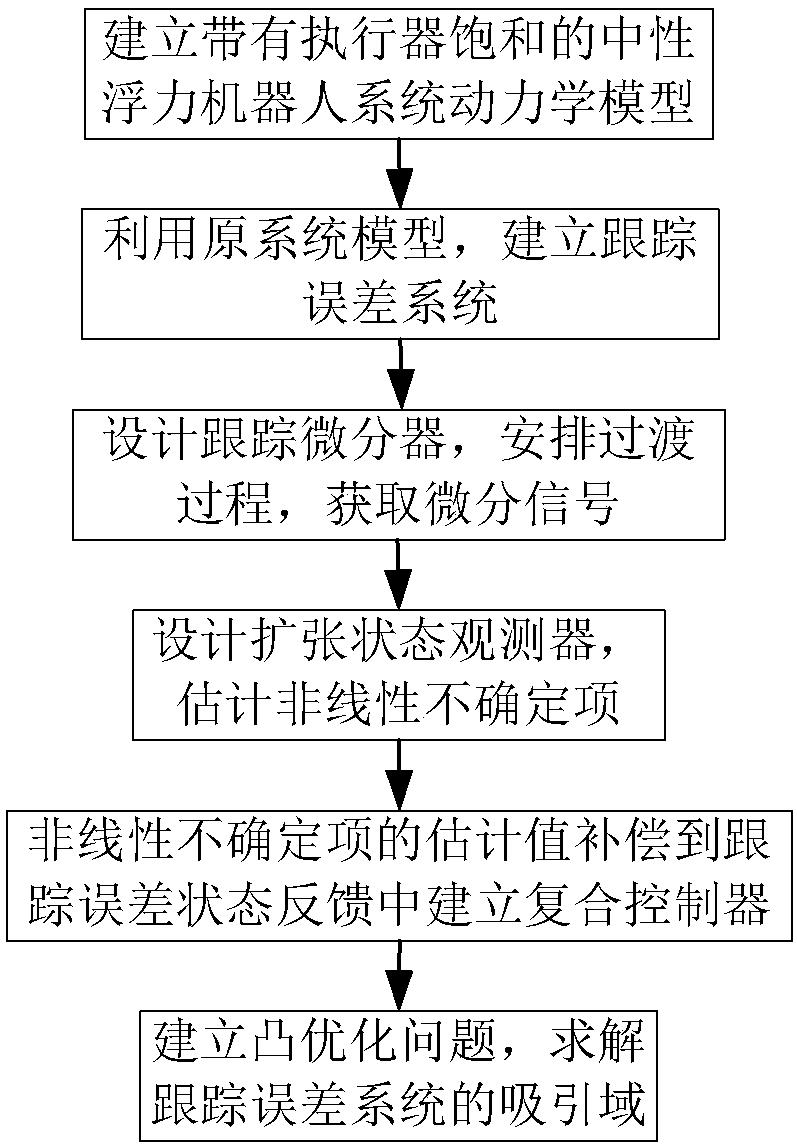
[0082] The present invention will be further described below in conjunction with accompanying drawing and specific embodiment:
[0083] The present invention is as process flow figure 1 As shown, the attitude and trajectory tracking control of the neutrally buoyant robot system with actuator saturation is realized through the following steps:
[0084] Step 1: Building a Neutrally Buoyant Robotic System Dynamics Model with Actuator Saturation
[0085] Establish geographic coordinate system Ox n the y n z n : respectively refer to the neutral buoyancy robot in Ox n 、Oy n and Oy z direction position; They refer to the roll angle, pitch angle, and yaw angle of the neutrally buoyant robot, respectively. Establish neutral buoyancy robot body coordinate system Ox b the y b z b : is the linear velocity vector of the neutrally buoyant robot, is the angular velocity vector of the neutrally buoyant robot. According to Ox n the y n z n with Ox b the y b z b relati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More