

Achiral magnetic control micro-stent robot as well as preparation method and application thereof
A non-chiral and robotic technology, applied in surgical robots, surgical manipulators, surgery, etc., can solve the problems of slow repair process, low stem cell utilization, stem cell death in the scaffold center, etc., and achieve low production cost and high efficiency in vivo joints Cavity-targeted therapy, low-cost effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
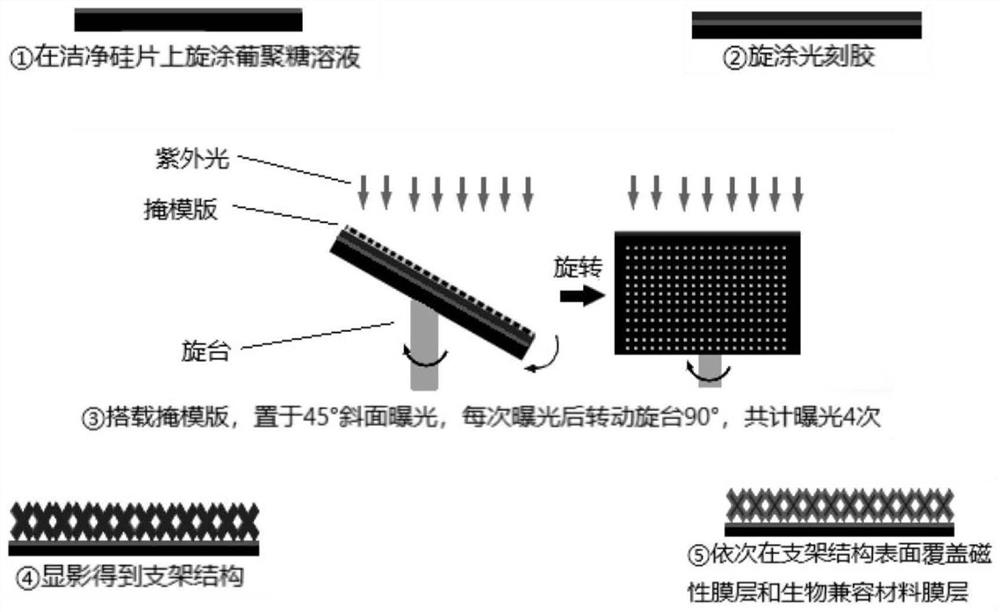
[0061] In this embodiment, the achiral magnetically controlled micro-stent robot is prepared, and the preparation process is as follows figure 1 As shown, the following steps are specifically included:
[0062] (1) Photolithography manufacturing of the main body of the mesh stent
[0063] Spin-coat a 10% concentration of dextran solution on a clean silicon wafer at an angular speed of 1500 rpm for 20 s. After spin-coating, bake at 80°C for 1min, then bake at 180°C for 30min, and dry to form a film. Coat SU-8 2050 type photoresist, spin coating angular speed is 3000rpm, duration is 30s. The coated silicon wafers were baked at 65°C for 1 min. Fix the sample on a stage with a slope of 45°, place a mask on the rubber surface, expose it under vertical ultraviolet rays, then rotate the stage 90° clockwise (counterclockwise), and perform exposure with the same parameters again. Repeat the steps of rotation and exposure for a total of 4 exposures. The exposed samples were baked a...
Embodiment 2
[0067] In this embodiment, a micro-scaffold robot loaded with stem cells is prepared, and the preparation process is as follows: Figure 4 As shown, it specifically includes the following steps:
[0068] (1) PLL coating
[0069] Put the achiral magnetically controlled micro-stent robot into the PLL solution of 10 micrograms per milliliter and soak for 10 minutes. The samples were taken out, washed 6 times with 10% PBS solution, and dried naturally.
[0070] (2) Stem cell inoculation
[0071] After counting the number of suitable stem cells, they were inoculated on the achiral magnetically controlled micro-stent robot treated as above, cultured for 1 week, and a CCK-8 test was performed every 1, 3, and 7 days. Prepare the cell suspension, divide it into two groups, and inoculate one group into a 96-well plate after counting, 100 μl per well, at 37°C, 5% CO 2 environment for 24 h adherent culture. Add 10 μl of CCK-8 solution to each well, incubate for 2 hours, measure the a...
Embodiment 3
[0078] In this embodiment, the performance test is carried out on the micro-scaffold robot loaded with stem cells:
[0079] After the achiral magnetically controlled micro-scaffold robot is loaded with cells, it is driven by a magnetic field. It can move in DI water or different biological fluids with good movement speed, and has two different movement characteristics under the control of two kinds of magnetic fields. Achiral magnetically controlled micro-stent robots can carry out long-distance target movement, and can maintain good movement speed and stability on the bottom surface with three-dimensional structure and rough bottom surface, and easily climb over obstacles. The specific performance test method is as follows:
[0080] (1) Exercise test:
[0081] Place the achiral magnetically controlled micro-stent robot in DI water, apply a magnetic field, perform swimming and rolling tests, check whether it can move, and observe the speed and stability of movement.
[0082]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More