

Space robot tracking control method for cold air propulsion
A space robot and tracking control technology, applied in the aerospace field, can solve the problems of unsuitability, small air-conditioning propulsion specific impulse, weak maneuverability of free-floating robots, etc., and achieve the effect of improving tracking control accuracy and strong suppression ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
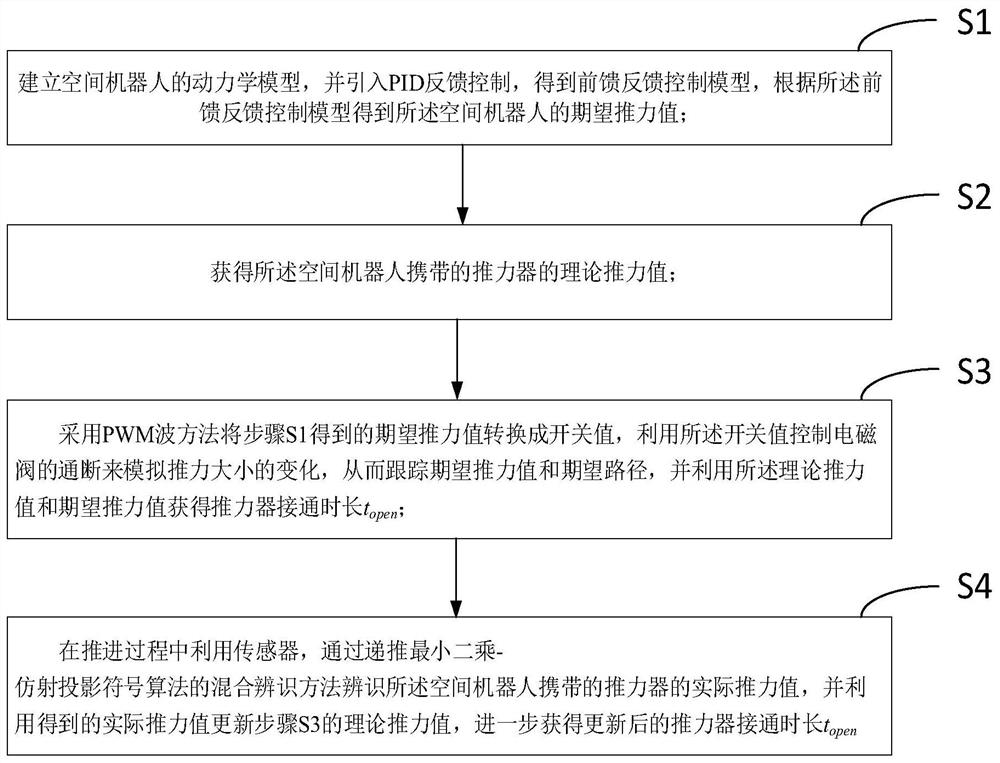
[0046] The first embodiment, such as figure 1 As shown, the embodiment of the present invention provides a space robot tracking control method for cold air propulsion, including:
[0047] S1. Establish a dynamic model of the space robot, and introduce PID feedback control to obtain a feedforward feedback control model, and obtain the expected thrust value of the space robot according to the feedforward feedback control model;
[0048] In a specific embodiment, taking a certain type of space robot as an example, the dynamic model is as follows:
[0049]
[0050] Among them, a and ω are the linear acceleration and angular velocity respectively, m is the total mass of the robot, J is the inertia tensor matrix, F and M are the force and moment provided by the thruster respectively, I 3 is a third-order identity matrix.
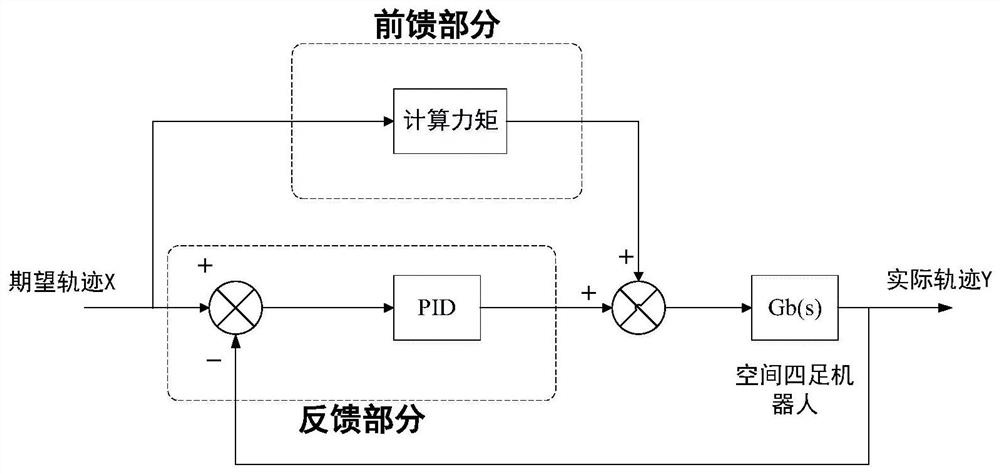
[0051] In a specific embodiment, the feedforward part of the feedforward feedback control model is based on the calculated torque method of the dynamic model, ...
no. 2 example
[0083] Figure 12 A schematic structural diagram of a computer device provided by another embodiment of the present application is shown. Figure 12 The computer device 50 shown is only an example, and should not impose any limitation on the functions and scope of use of the embodiments of the present application. like Figure 12 As shown, computer device 50 takes the form of a general-purpose computing device. Components of computer device 50 may include, but are not limited to: one or more processors or processing units 500 , system memory 516 , bus 501 connecting various system components including system memory 516 and processing unit 500 .
[0084] Bus 501 represents one or more of several types of bus structures, including a memory bus or memory controller, a peripheral bus, an accelerated graphics port, a processor, or a local bus using any of a variety of bus structures. These architectures include, by way of example, but are not limited to Industry Standard Archite...
no. 3 example
[0092] Another embodiment of the present application provides a computer-readable storage medium, on which a computer program is stored, and when the program is executed by a processor, the method provided in the first embodiment above is implemented. In practical applications, the computer-readable storage medium may use any combination of one or more computer-readable media. The computer readable medium may be a computer readable signal medium or a computer readable storage medium.
[0093] A computer-readable storage medium may be, for example, but not limited to, an electrical, magnetic, optical, electromagnetic, infrared, or semiconductor system, device, or device, or any combination thereof. More specific examples (non-exhaustive list) of computer readable storage media include: electrical connections with one or more leads, portable computer disks, hard disks, random access memory (RAM), read only memory (ROM), Erasable programmable read-only memory (EPROM or flash mem...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More