Unfortunately, piezoelectric scanners acquire a number of unwanted behaviors for translations on the
micron scale and larger.
The result is that a scan voltage applied to one axis may change the resulting motion on another axis.
These unwanted behaviors in the piezoelectric response will mean that at large amplitudes, a linear
signal applied to the piezo electrodes no longer produces a
linear scan.
In addition to non-linearities and
coupling, there may be other unwanted behaviors that make the scan pattern asymmetric when driven by a symmetric scan voltage.
For example, piezoelectric scanners exhibit
hysteresis such that as the direction of the applied voltage changes at the end of a scan, the position of the moving part of the piezoelectric scanner does not trace out its previous path.
Additional problems are caused by slow drifts in position caused by "
creep."
There are also other drifts in the position of the scanner caused primarily by temperature variations and stresses in the scanner and its mounting hardware.
All of these effects conspire to make it difficult to create
distortion-free scans for scan ranges larger than roughly 1 micron.
Deviations from linear scans make these accurate measurements difficult.
The nonlinear scans also present similar problems in the use of scanning stages in other areas of application.
It is difficult to produce images in real time using this method, because many calculations are required after the data has been collected, This approach is described by Gehrtz et al in U.S. Pat. No. 5,107,113.
Barrett describes several limitations of this method including the large amount of data which must be stored, inferior images resulting from the interpolation process, and the inability to measure very small position changes.
For larger scans, in the 1 to 100 micron range, this approach has the difficulty of requiring
detailed data concerning the behavior of each particular piezoelectric scanner, and therefore requires extensive calibration of each scanner in the manufacturing process.
. . for scans smaller than about 500 Angstroms the
noise in the scan caused by the feedback
system (dominated by the sensor
noise) begins to noticeably degrade the
image quality."
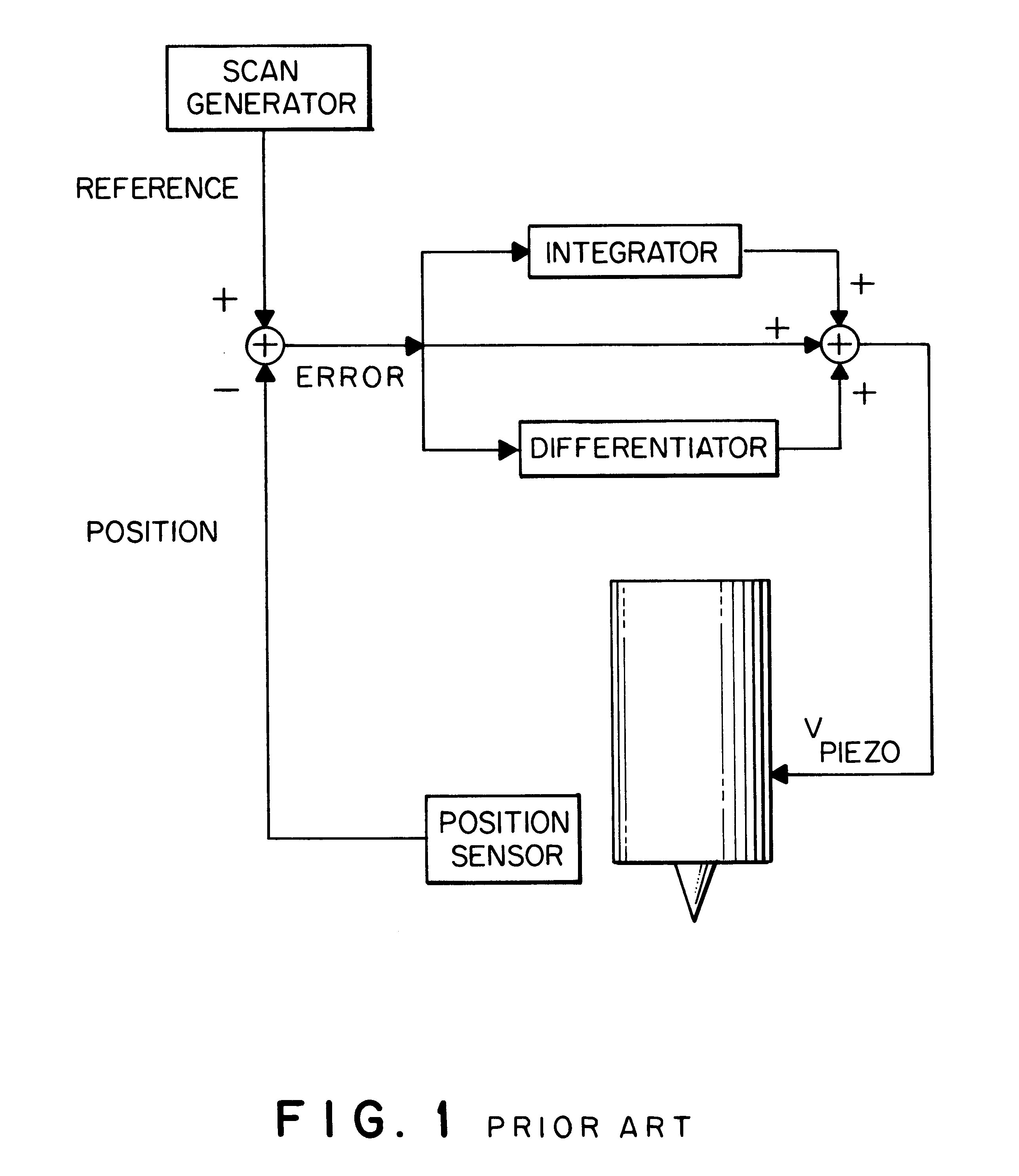
The sudden change in direction leads to a large error which takes time for the system to correct.
The prior art control methods which rely on integration of the
error signal to achieve an accurate
linear scan take longer to recover control after reversal since the transient error is stored by the integral.
The conventional
closed loop control also fails to anticipate the special scan voltage requirements of piezoelectric transducers discussed by Elings et al in U.S. Pat. No. 5,051,644.
Unfortunately, it is difficult to find a sensor that matches well the operating
dynamic range and bandwidth requirements of many piezoelectric scanners.
While position sensors used in the prior art work acceptably for large scale scans, most do not have sufficient resolution to control accurately scans on the nanometer scale.
Since atomic scale scans may be only 1 nm square, this resolution is clearly inadequate.
This limits either the speed or the accuracy with which the scanner can be moved.
Unfortunately for scanning probe microscopes, most users wish to speed up the scan for the small scans to reduce the effect of 1 / f noise in the probe detection
electronics and to minimize the effect of mechanical drift and
transducer creep.
So the requirements do not match the prior art approaches.
In the few cases where sensors can be optimized to provide subnanometer resolution, the sensors usually lack the
dynamic range to also measure motions on the 100-
micron scale.
Also, since the output is periodic, they have potentially infinite
dynamic range (the sensor can measure infinitely large position shifts by counting an arbitrarily high number of periods).
Since scanning probe microscopes and other modern scanning systems require motions on a much smaller scale, it has been insufficient in the prior art to simply count successive periods.
These complex devices are very expensive and are not easily adapted to scanning systems such as scanning probe microscopes.
Such sensors can not be used directly in conventional control systems without some form of
linearization.
There are serious drawbacks to turning the feedback off.
First, there is no longer any control over the scan size.
This can make it difficult to localize and then "
zoom in" on an object of interest in a scanning probe
microscope.
Another
disadvantage to turning the feedback off at small scans is that there is no longer any correction for "
creep."
"
Creep" and other forms of drift are perhaps the largest source of distortions at small scan sizes, so turning off the feedback altogether is an unattractive alternative.



 Login to View More
Login to View More