

Device and method for inhibiting rotor rotation and oscillation of hybrid stepping motor
A technology of stepping motor and restraining device, which is applied in the direction of motor generator control, control of electromechanical transmission device, electronic commutation motor control, etc. operation and other problems, to achieve the effects of low cost, wide operating speed range, and suppression of rotor oscillation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0096] According to the above analysis of the rotor oscillation suppression strategy, the block diagram of the new hybrid stepper motor open-loop drive system proposed in this example is as follows Figure 7A shown.
[0097] Figure 7A The middle rectifier bridge 1 rectifies the front-end AC voltage 31 into a DC voltage 13 . If there is a DC power supply outside the driver, the rectifier bridge 1 can be omitted. A-phase inverter 3 and B-phase inverter 2 have exactly the same structure, both are single-phase full-bridge topology, supply power to A-phase winding 29 and B-phase winding 28 respectively, and generate required voltage under the control of PWM signals 27 and 26 Stator winding voltage. According to the direction of rotation 14, the subdivision of microsteps 30, and the frequency of the external pulse 15, the given rotor speed 16 can be calculated as follows:
[0098] n r * = 60 · ...
Embodiment 2
[0111] In fact, the above idea of phase angle modulation of the control variable can also be used in the current closed-loop micro-step control system. In the analysis, the influence of core saturation and the influence of higher harmonics in the main permeance are ignored. The electromagnetic torque generated by the two-phase windings of A and B of the two-phase hybrid stepping motor are respectively:
[0112] T A =-Ki A sinθ r
[0113] T B = - Ki B sin ( θ r - π 2 ) (Formula 18)
[0114] Among them, K is the torque coefficient.
[0115] If the two-phase windings are fed with the following orthogonal currents:
[0116] i A = I p cos(θ i )
[0117] i B = I p sin(θ i ) (Equation 19)
[0118] Among them, I p is the current pe...
Embodiment 3
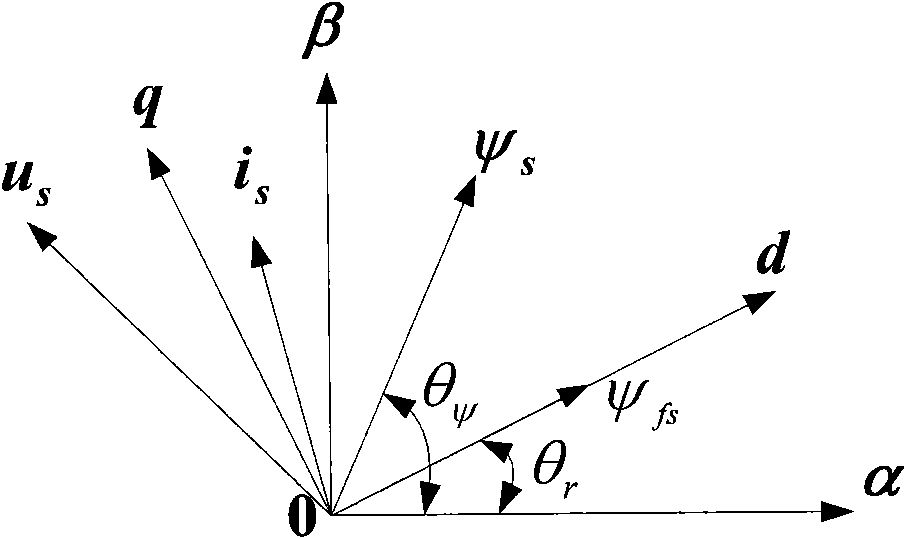
[0126] The above-mentioned rotor oscillation suppression function can also be applied to the multi-phase hybrid stepping motor system. In specific applications, it is necessary to statically transform the multi-phase stator winding variable to figure 1 αβ two-phase stationary coordinate system. Then construct the control algorithm in the αβ coordinate system, the control algorithm in the αβ coordinate system is exactly the same as the control algorithm of the previous two-phase hybrid stepping motor. No more details.
[0127] In summary, the above-mentioned implementations 1 and 2 have the common advantage of observing the stator winding flux linkage and electromagnetic torque in the form of software programming by means of the stator winding current and stator winding terminal voltage, and obtaining control based on the observed electromagnetic torque calculation. Variable phase angle modulation value to achieve the purpose of suppressing the rotor oscillation when the hybri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More